強化学習におけるReinforceを5行程度で説明して下さい(江端メモ)
エージェントは環境との相互作用からエピソード全体の報酬を得て、その合計報酬を基準に行動確率を更新する。
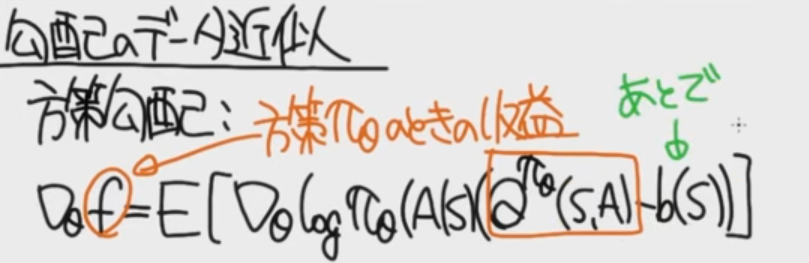
具体的には「得られた報酬が大きい行動の確率を高め、報酬が小さい行動の確率を下げる」方向にパラメータを勾配上昇させる。
この方法は単純だが、分散が大きく学習が安定しにくい問題がある。
その後のアルゴリズム(Actor-Criticなど)は、この分散を抑える工夫を加えて発展している。
状態S_0 → 行動A_0 → 報酬R_0 → 状態S_1 → 行動A_1 → 報酬R_1 → .... を繰り返す というデータがあったとする。
エピソードとは、上記の一連のデータのかたまりのこと
ふむふむ。
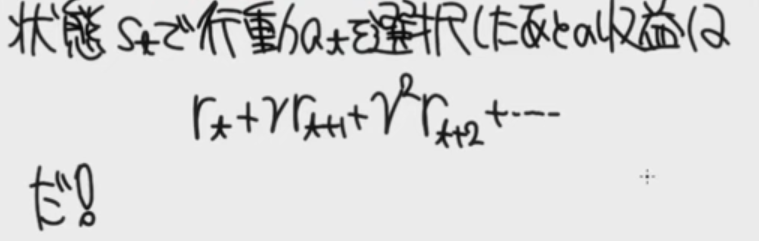
なるほど、収益は、その後の行動に影響するが、遠い未来は、rで減衰させる、ということだな。
深層学習の関数とは何ですか。簡単に説明して下さい。簡単な例題があればお願いします
深層学習における「関数」とは、入力を受け取り、出力を返す仕組みを数式で表したものを指す。
ニューラルネットワーク全体は「複雑な関数」であり、各層で「単純な関数(線形変換+非線形変換)」を重ねていくことで成り立っている。
例えば1つの層では、入力ベクトル
に対して重み
とバイアス
を使い、
という関数を定義する。ここで
は活性化関数(例:ReLUやシグモイド)である。
簡単な例題
入力
、重み
、バイアス
、活性化関数をReLU(負の値を0にする関数)とすると、
となる。
このように、深層学習は「多数の関数を組み合わせて、大きな入力(画像や音声など)から目的の出力(分類ラベルなど)を計算する仕組み」と考えられる。
もっと具体的な関数の種類(例えばシグモイド関数やソフトマックス関数)についても例を見たいですか?
シグモイド関数やソフトマックス関数の例を見たいです
了解しました。代表的な「シグモイド関数」と「ソフトマックス関数」を、簡単な数値例で説明します。
1. シグモイド関数 (Sigmoid)
式:
入力を 0〜1の範囲に圧縮する関数。確率っぽい値を出すためによく使われる。
例
のとき:
のとき:
のとき:
2. ソフトマックス関数 (Softmax)
式(複数入力
に対して):
複数の値を 確率分布(合計1になる) に変換する関数。分類問題の出力層でよく使われる。
例
入力が
の場合:
- 合計 =
- Softmaxの出力は:
つまり、入力
を確率分布に変換すると「クラス1が67%の確率で正しい」といった形になる。
Reinforceは、離散時刻tのデータがあるものに用いられる、という理解で良いですか?
はい、その理解でおおむね正しいです。
補足説明
Reinforceは方策勾配法 (policy gradient) の一種で、離散的な「時刻
」ごとにエージェントが行動を選び、環境から報酬を受け取る状況を前提にしています。つまり、
- 状態
を観測
- 方策
に従って行動
を選択
- 報酬
を得て次の状態に遷移
という「離散時刻ステップ」で進行する枠組みに適用されます。
例
例えば「迷路探索」や「強化学習の標準タスク(CartPoleなど)」は、すべて1ステップずつ行動→報酬→次状態、という離散的な流れであり、Reinforceはそのデータを使って方策の更新を行います。
逆に「連続時間」での学習や制御にも拡張は可能ですが、その場合は一度離散化して扱うのが一般的です。
図に出てくる記号は、強化学習でよく使われる基本的な要素を表しています。
π(パイ)
方策(policy)のこと。
状態
を見て、どの行動
をとるかを決める確率分布。
Reinforceでは、この
のパラメータを勾配法で更新する。
V(バリュー)
価値関数(state value function)。
ある状態
からスタートしたときに、将来得られる報酬の期待値。
式で書くと:
Q(キュー)
行動価値関数(action value function)。
状態
で行動
を選んだ場合に、将来得られる報酬の期待値。
式で書くと:
p(ピー)
環境の遷移確率。
「状態
で行動
を取ったら、次に状態
に遷移する確率」を表す。
式で書くと:
r(アール)
報酬(reward)。
行動を取った直後に得られるスカラー値。
学習の目的は、これをできるだけ大きく積み上げるように方策
を改善すること。
要するに、
:エージェントが「どう動くか」を決める確率分布
:その動きが「どれだけ得か」を数値化するもの
:環境側のルール(遷移と報酬)
という役割分担になっています。
VとQの違いを教えて下さい。
良い質問です。VとQはどちらも「将来の報酬の期待値」を表しますが、見る単位が違うのがポイントです。
V(価値関数, Value Function)
- 「状態の価値」を表す
- 状態
にいるとき、方策
に従って行動した場合に得られる将来報酬の期待値
- 数式:
- 例:迷路で「スタート地点にいるとき、この後うまく進んでゴールできそうか?」を評価
Q(行動価値関数, Action Value Function)
- 「状態+行動の価値」を表す
- 状態
で特定の行動
を選んだとき、方策
に従って進んだ場合に得られる将来報酬の期待値
- 数式:
- 例:迷路で「スタート地点から右に進んだ場合に、最終的にゴールできそうか?」を評価
違いを直感で言うと
- Vは「この場所そのものがどれくらい良いか」
- Qは「この場所でこの行動を取ったらどれくらい良いか」
もしご希望なら、この違いを「簡単な迷路の図」を使って具体的に数値例で示すこともできますが、やってみますか?
お願いします。
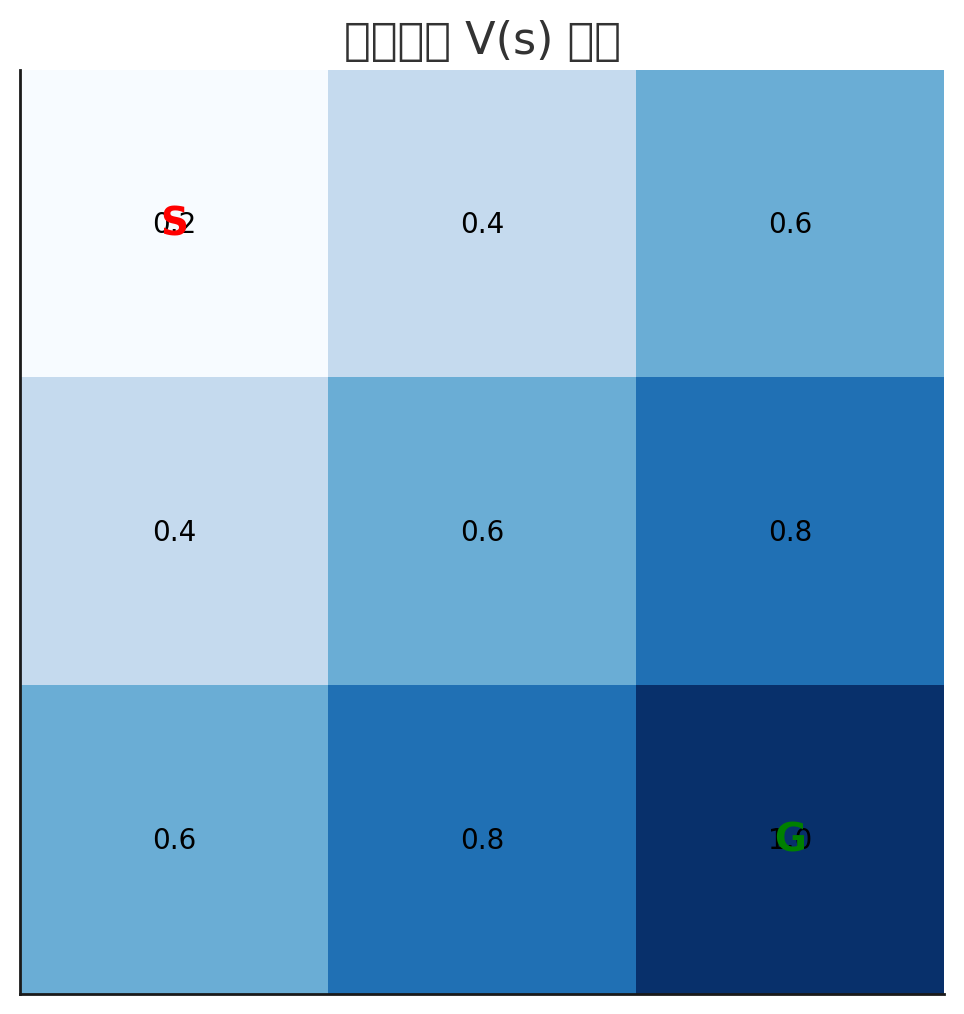
この図は、3×3の簡単な迷路での 状態価値 V(s) の例です。
- ゴール(G)に近づくほど
の値が高くなっています。
- スタート(S=左上)の
は、「ここから方策通り進めば、まあまあ報酬が得られるだろう」という期待値。
一方で、行動価値 Q(s,a) は「状態+行動」の評価です。
例えばスタート地点 S での Q 値は次のように設定しました:
- 右に進む →
(少しゴールに近づく)
- 下に進む →
(同じくゴールに近づく)
- 左に進む →
(壁で意味なし)
- 上に進む →
(壁で意味なし)
まとめると:
- V(s) = その場所にいる「価値」
- Q(s,a) = その場所で「特定の行動をとった場合の価値」
という違いになります。
ご希望なら、この例を「数式の形(VとQの関係式)」に落とし込んで整理することもできますが、続けますか?
続けて下さい
では、先ほどの迷路例を使って、数式でVとQの関係を整理します。
1. Q関数の定義
行動価値関数
は、状態
で行動
を選んだときの将来報酬の期待値です。
:行動した直後の報酬
:割引率
:次の状態
2. V関数とQ関数の関係
状態価値関数
は、その状態にいるとき、方策
に従って行動したときの期待値です。
つまり、
- VはQの期待値
- 方策に従って「どの行動をどのくらいの確率で取るか」を平均したものがV
3. 迷路のスタート地点の例
スタート地点 S における Q 値を思い出します:
もし「右と下を半々の確率で選ぶ」方策なら:
このように、VはQの加重平均として計算できます。
まとめ
- Qは「行動レベルの価値」
- Vは「行動を選ぶ方策を平均した状態レベルの価値」
- 数式で両者は明確に結びついており、VはQの期待値になっている
ここまでで「VとQの違い」と「数式でのつながり」を説明しました。
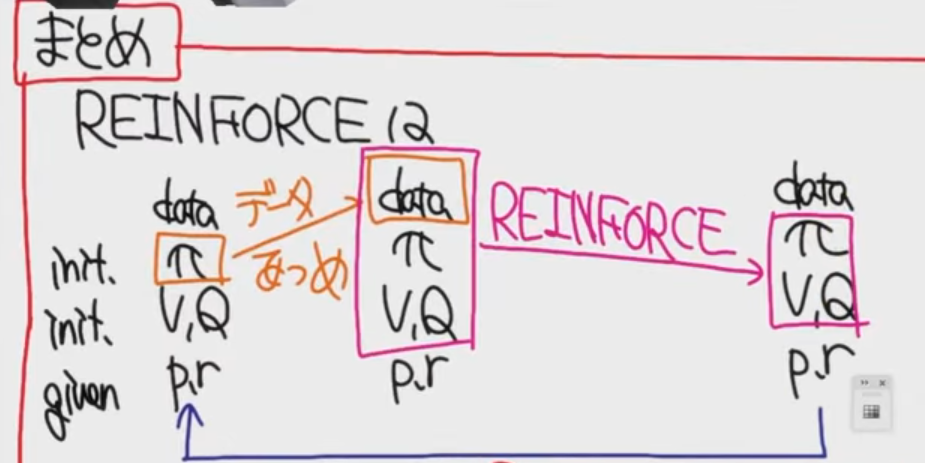
REINFORCEとは、方策購買定理もどきをデータの平均値をつかって行えるもの、と、とりあえず理解。
「Actor-CriticでVとQがどう使われるか」に踏み込んで下さい。
承知しました。ここからは Actor-Critic 法 における V と Q の役割を整理して説明します。
1. Actor-Critic とは何か
- Actor(方策担当):方策
を学習する。つまり「どう動くか」を決める役。
- Critic(批評担当):状態や行動の「価値」を推定する。Actor の行動が良いか悪いかを評価する役。
Reinforce単独では「得られた報酬だけ」を使って更新するため分散が大きいが、Criticを導入することで安定性が向上する。
2. Critic が使うもの:VかQか
Criticは大きく分けて2種類あります。
(A) State-value critic(V関数を使う)
- Critic は
を推定する。
- Actor の更新には「アドバンテージ(advantage)」を使う:
これにより「平均より良い行動かどうか」を基準に学習できる。
(B) Action-value critic(Q関数を使う)
- Critic が直接
を学習する。
- Actor は「Q値の高い行動をより選びやすくなるように」方策を更新する。
3. 更新の仕組み(簡略化)
Actor のパラメータ
を更新するとき、Reinforceでは:
(ここで
は将来報酬の合計)
Actor-Critic では Critic の推定を組み込んで:
この
が TD誤差(Temporal Difference Error) で、実際の報酬と価値予測のずれを表す。
4. 直感的イメージ
- Actor:「じゃあ右に進んでみよう」
- Critic:「その結果の報酬とVを比べると予測よりちょっと良かったから、右を選ぶ確率を上げた方がいいね」
これを繰り返すことで、
- Critic は環境を正しく評価できるようになり、
- Actor は評価を参考により良い行動を選べるようになる。
5. まとめ
- Actor-Critic は Reinforceの改良版
- Critic が V または Q を学習し、Actor の更新に「評価基準」として使う
- この仕組みにより、Reinforceの「分散が大きくて不安定」という弱点を補う
上記の図を使った例でActor-Criticを説明できませんか?
良い視点です。では、先ほどの 3×3迷路(スタートS・ゴールG) の図を使って、Actor-Critic がどう働くかを例で説明します。
1. 迷路の状況
- スタート地点:S(左上)
- ゴール:G(右下、報酬=+1)
- Actor(方策):上下左右に動く確率を持っている
- Critic(価値関数):各マスの「価値
」を予測している
2. スタート時点での行動選択
スタートS(状態)にいるとき、Actorは確率的に行動を選ぶ:
- 右に行く確率 0.25
- 下に行く確率 0.25
- 左/上に行く確率 0.25ずつ
このとき、Criticは「Sの価値は0.2」と予測しているとします(前回の図より)。
3. 実際に行動 → 報酬観測
例えば「右へ移動」した場合、
- 即時報酬
(ゴールではないので0)
- 次の状態Sは
、Criticの予測値は
4. Criticによる評価(TD誤差)
Criticは「予測と実際の差」を計算します:
ここで
とすると、
→ 予測より「ちょっと良かった」と判断。
5. 更新の流れ
- Criticの更新
「Sの価値予測を上方修正した方がよい」と学習する。 - Actorの更新
「右に行く行動は予測より良かったので、その確率を上げるように」学習する。
6. 繰り返しの結果
この流れを何度も繰り返すことで:
- Criticは「各マスの価値」を正しく近似できるようになる
- Actorは「ゴールに近づく行動の確率」を徐々に高める
- 最終的に「スタートから右か下に進み、効率的にゴールする方策」が得られる
まとめ
- 図の
は Critic が推定する「状態価値」
- Q や TD誤差は「行動が平均より良かったか」を判断する材料
- Actor はこの評価をもとに「良い行動を強化、悪い行動を抑制」する
もしご希望なら、この迷路をシミュレーションして、実際にActorの行動確率がどう変化するか をコードでお見せできますが、見てみますか?