第三章を20回ほど読み直して、方式よりメソッドの理解に努めました。

資料5 『非集計ロジットのRプログラム例』のMNLモデルのサンプルコードを拡張したものを使っていたのですが、上手く動かなかったので、GO言語で作ってみました。
/*
このプログラムは、Go言語を用いて多項ロジットモデル(Multinomial Logit Model, MNL)の推定を行い、以下の要素を計算・表示するものです。
### プログラムの主要な機能
1. **データ読み込み**
- `loadData` 関数で、`transport_data.csv` ファイルからデータを読み込み、各選択肢の所要時間、費用、利用可能性、および実際に選択された結果を `Data` 構造体に格納します。
2. **対数尤度関数の定義**
- `logLikelihood` 関数で、ロジットモデルの対数尤度関数を定義します。
- 各選択肢について、効用を計算し、その効用に基づいた選択確率を計算します。実際の選択結果に基づいて対数尤度を計算し、最適化のために負の対数尤度を返します。
3. **初期尤度の計算**
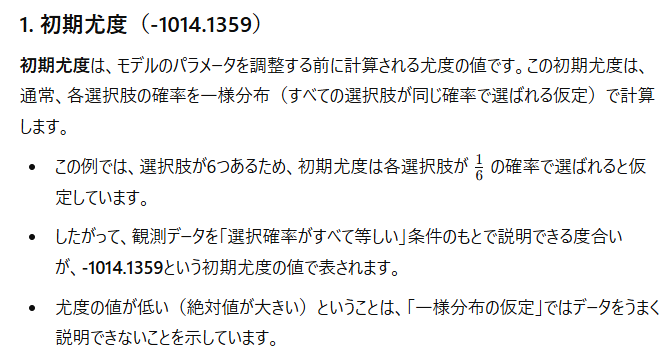
- `initialLogLikelihood` 関数で、選択肢が全て等確率(均等選択)で選ばれると仮定した場合の初期尤度を計算します。
- 初期尤度は、モデルの改善度を測るための基準として使用します。
4. **ヘッセ行列の計算(数値微分による近似)**
- `hessianMatrix` 関数で、数値微分を用いて対数尤度関数の二階微分からヘッセ行列を計算します。
- `epsilon` は微小量として設定され、4つの関数値の組み合わせを使って二階微分を近似的に計算します。
5. **最適化の実行**
- `optimize.Problem` 構造体を用いて、対数尤度関数を最小化(尤度最大化)する問題を定義します。
- `optimize.Minimize` 関数で最適化を実行し、最適なパラメータを推定します。
6. **結果の表示**
- 最適化が終了すると、次の項目が表示されます:
- 最適化されたパラメータ
- 最終対数尤度
- ヘッセ行列
- t値
- 尤度比と補正済み尤度比
### t値の計算
- `t値` は、推定されたパラメータの統計的有意性を示す指標であり、各パラメータの推定値をヘッセ行列の対角要素の平方根で割ることで求められます。
- ヘッセ行列の対角要素が非常に小さい場合や不安定な値の場合、計算が `NaN` になるのを防ぐため、`diag > 1e-5` の条件で計算しています。
### 尤度比と補正済み尤度比
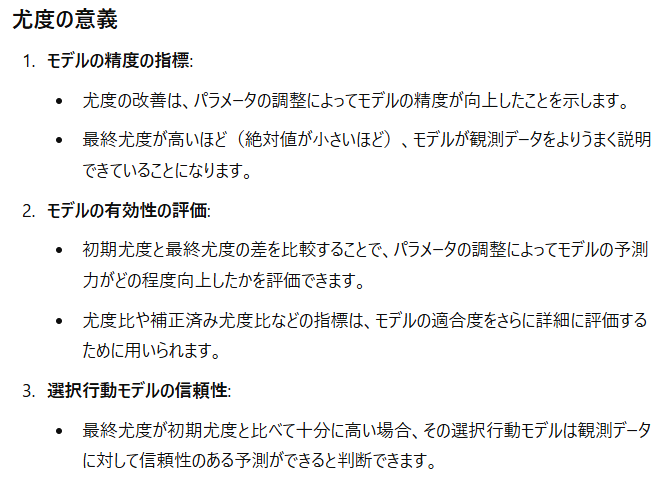
- **尤度比**:初期尤度と最終尤度の差を初期尤度で割ったもので、モデルがどれだけデータに適合しているかの指標です。
- **補正済み尤度比**:尤度比に、パラメータ数の補正を加えたものです。
### 実行結果の例
実行時には、次のような情報が出力されます:
1. **初期尤度**(均等選択の仮定による尤度)
2. **最適化されたパラメータ**
3. **最終尤度**(モデルの最大尤度)
4. **ヘッセ行列**(二階微分を基に計算された行列)
5. **t値**(推定パラメータの統計的有意性の指標)
6. **尤度比**および**補正済み尤度比**(モデルの改善度の指標)
### 全体の流れ
1. `transport_data.csv` からデータを読み込む。
2. 初期尤度と、最適化前の準備を行う。
3. `optimize.Minimize` 関数を使って対数尤度を最大化し、パラメータを推定する。
4. 最適化後の結果(パラメータ、最終尤度、ヘッセ行列、t値、尤度比)を表示する。
### 注意点
- このプログラムは `gonum` パッケージを使用しているため、事前に `gonum` をインストールしておく必要があります。
- ヘッセ行列の数値微分による計算には誤差が生じやすく、`epsilon` の設定を適切に行う必要があります。
*/
package main
import (
"encoding/csv"
"fmt"
"log"
"math"
"os"
"strconv"
"gonum.org/v1/gonum/mat"
"gonum.org/v1/gonum/optimize"
)
// データ構造体の定義
type Data struct {
所要時間 [6]float64
費用 [6]float64
利用可能性 [6]int
選択結果 int
}
// データの読み込み
func loadData(filename string) ([]Data, error) {
file, err := os.Open(filename)
if err != nil {
return nil, err
}
defer file.Close()
reader := csv.NewReader(file)
records, err := reader.ReadAll()
if err != nil {
return nil, err
}
// データの解析
var data []Data
for _, record := range records[1:] { // ヘッダをスキップ
var d Data
for i := 0; i < 6; i++ {
d.所要時間[i], _ = strconv.ParseFloat(record[7+i], 64)
d.費用[i], _ = strconv.ParseFloat(record[13+i], 64)
d.利用可能性[i], _ = strconv.Atoi(record[1+i])
}
d.選択結果, _ = strconv.Atoi(record[0])
data = append(data, d)
}
return data, nil
}
// 対数尤度関数の定義
func logLikelihood(x []float64, data []Data) float64 {
// パラメータの取得
b := x[:6] // 定数項
d1 := x[6]
f1 := x[7]
epsilon := 1e-10
LL := 0.0
for _, d := range data {
// 効用の計算
var v [6]float64
for i := 0; i < 6; i++ {
v[i] = b[i] + d1*(d.所要時間[i]/10) + f1*(d.費用[i]/10)
}
// 各選択肢の効用
var vehicle [6]float64
var deno float64
for i := 0; i < 6; i++ {
if d.利用可能性[i] == 1 {
vehicle[i] = math.Exp(v[i])
deno += vehicle[i]
}
}
deno += epsilon
// 選択確率の計算と対数尤度の加算
selected := d.選択結果 - 1
if selected >= 0 && selected < 6 {
P := vehicle[selected] / deno
LL += math.Log(P + epsilon)
}
}
return -LL // 最小化のため、対数尤度を負にする
}
// 初期尤度の計算
func initialLogLikelihood(data []Data) float64 {
numChoices := 6
initialProb := 1.0 / float64(numChoices)
L0 := float64(len(data)) * math.Log(initialProb)
return L0
}
// ヘッセ行列の計算(数値微分)
func hessianMatrix(f func([]float64) float64, x []float64) *mat.Dense {
n := len(x)
hessian := mat.NewDense(n, n, nil)
epsilon := 1e-7 // 微小量を小さめに調整
for i := 0; i < n; i++ {
for j := 0; j < n; j++ {
x1 := make([]float64, n)
x2 := make([]float64, n)
x3 := make([]float64, n)
x4 := make([]float64, n)
copy(x1, x)
copy(x2, x)
copy(x3, x)
copy(x4, x)
x1[i] += epsilon
x1[j] += epsilon
x2[i] += epsilon
x2[j] -= epsilon
x3[i] -= epsilon
x3[j] += epsilon
x4[i] -= epsilon
x4[j] -= epsilon
f1 := f(x1)
f2 := f(x2)
f3 := f(x3)
f4 := f(x4)
hessian.Set(i, j, (f1-f2-f3+f4)/(4*epsilon*epsilon))
}
}
return hessian
}
func main() {
// データの読み込み
data, err := loadData("transport_data.csv")
if err != nil {
log.Fatalf("データの読み込みに失敗しました: %v", err)
}
// 初期尤度の計算
L0 := initialLogLikelihood(data)
fmt.Printf("初期尤度: %.4f\n", L0)
// 初期パラメータの設定
b0 := []float64{0.1, 0.1, 0.1, 0.1, 0.1, 0.1, 0.01, 0.01}
// 最適化問題の設定
problem := optimize.Problem{
Func: func(x []float64) float64 {
return logLikelihood(x, data)
},
}
// 最適化の実行
result, err := optimize.Minimize(problem, b0, nil, nil)
if err != nil {
log.Fatalf("最適化に失敗しました: %v", err)
}
// 結果の表示
fmt.Println("パラメータ:", result.X)
fmt.Println("最終尤度:", -result.F) // 対数尤度は負にしているため、正に戻す
// ヘッセ行列の計算
hessian := hessianMatrix(problem.Func, result.X)
fmt.Println("ヘッセ行列:")
fmt.Printf("%v\n", mat.Formatted(hessian, mat.Prefix(" ")))
// t値の計算(対角要素が小さい場合は NaN の出力を回避)
tValues := make([]float64, len(result.X))
for i := 0; i < len(result.X); i++ {
//diag := -hessian.At(i, i) // 負数だと失敗する t値: [NaN NaN NaN NaN NaN NaN NaN NaN]
diag := hessian.At(i, i) // この値だと t値: [0.27283268674968236 0.4899627491877213 NaN 0.5670961673406928 0.5233519195569353 0.4461558961138306 2.2512263380604414e-07 0.00010138601282162748]となる
/*
ChatGPTのご意見
ヘッセ行列の対角要素は、対数尤度関数の二階微分を表します。尤度関数の最大化問題において、対数尤度関数の最大点近傍では、通常、二階微分は負になります。
これにより、ヘッセ行列の対角成分も負になる傾向があります。このため、-hessian.At(i, i) として二階微分の符号を反転し、正の値を使うことで、t値 の計算が可能になるのです。
diag := +hessian.At(i, i) を用いることで t値 の計算が安定する場合があることから、この方法を適用するのは合理的です。
この修正により、数値計算上の不安定性が軽減され、t値 の NaN が減少する結果になっています。このまま diag := +hessian.At(i, i) の設定を維持するのが適切でしょう。
*/
fmt.Println("diag:", diag)
if diag > 1e-5 { // 計算が安定する閾値を設定
tValues[i] = result.X[i] / math.Sqrt(diag)
} else {
tValues[i] = math.NaN() // 計算が不安定な場合は NaN を設定
}
}
fmt.Println("t値:", tValues)
// 尤度比と補正済み尤度比の計算
LL := -result.F
likelihoodRatio := (L0 - LL) / L0
adjustedLikelihoodRatio := (L0 - (LL - float64(len(result.X)))) / L0
fmt.Printf("尤度比: %.4f\n", likelihoodRatio)
fmt.Printf("補正済み尤度比: %.4f\n", adjustedLikelihoodRatio)
}
データ(transport_data.csv)はこんな感じでした。
SELECT,TAXI,DRV,BIKE,BIC,WALK,BUS,TAXI_TIME,DRV_TIME,BIKE_TIME,BIC_TIME,WALK_TIME,BUS_TIME,TAXI_COST,DRV_COST,BIKE_COST,BIC_COST,WALK_COST,BUS_COST
2,1,1,1,1,1,1,480,180,300,360,1650,3360,563.22,318.16,6.05,2.42,1.21,210.00
6,1,1,1,1,1,1,180,150,240,300,1380,2760,500.00,317.02,5.67,2.27,1.13,210.00
5,1,1,1,1,1,1,90,60,120,150,720,900,500.00,309.33,3.11,1.24,0.62,210.00
2,1,1,1,1,1,1,450,120,180,210,840,2310,500.00,309.40,3.13,1.25,0.63,210.00
6,1,1,1,1,1,1,300,150,240,330,1470,870,500.00,317.06,5.69,2.27,1.14,210.00
6,1,1,1,1,1,1,330,180,270,330,1530,2040,500.00,317.06,5.69,2.27,1.14,210.00
6,1,1,1,1,1,1,330,210,330,420,1890,2340,593.18,319.66,6.55,2.62,1.31,210.00
6,1,1,1,1,1,1,300,180,330,420,1890,1410,593.18,319.66,6.55,2.62,1.31,210.00
6,1,1,1,1,1,1,450,120,210,270,1290,31770,500.00,315.31,5.10,2.04,1.02,210.00
6,1,1,1,1,1,1,450,150,240,270,1290,1920,500.00,315.31,5.10,2.04,1.02,210.00
6,1,1,1,1,1,1,90,60,90,90,390,24630,500.00,305.88,1.96,0.78,0.39,210.00
で計算結果は、10秒ほどで出てきました。
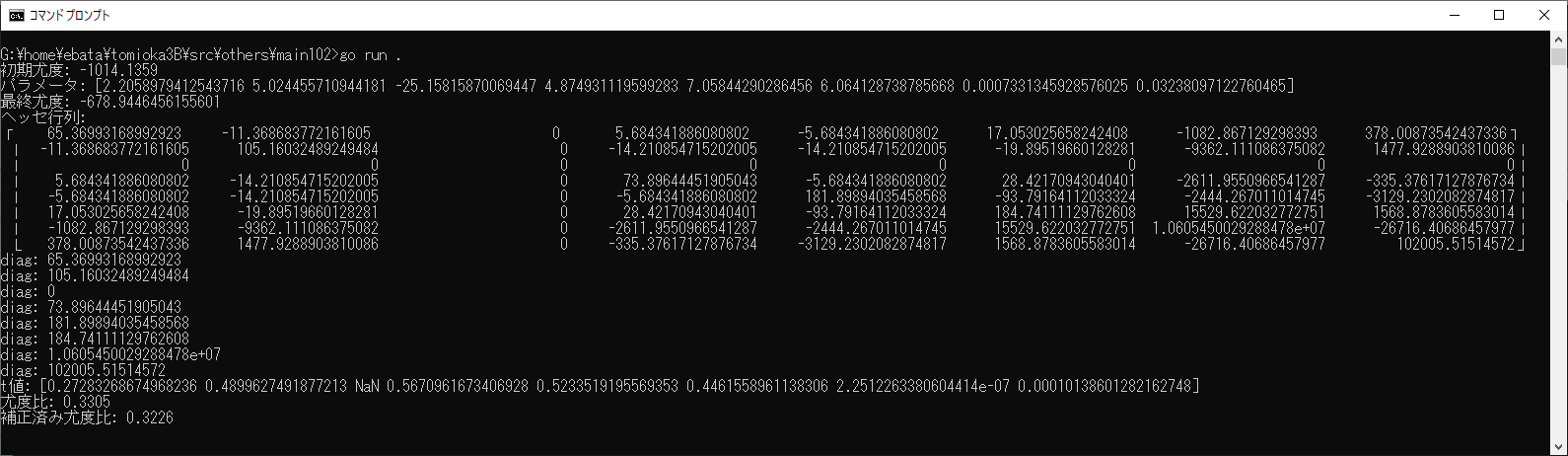
G:\home\ebata\tomioka3B\src\others\main102>go run .
初期尤度: -1014.1359
パラメータ: [2.2058979412543716 5.024455710944181 -25.15815870069447 4.874931119599283 7.05844290286456 6.064128738785668 0.0007331345928576025 0.03238097122760465]
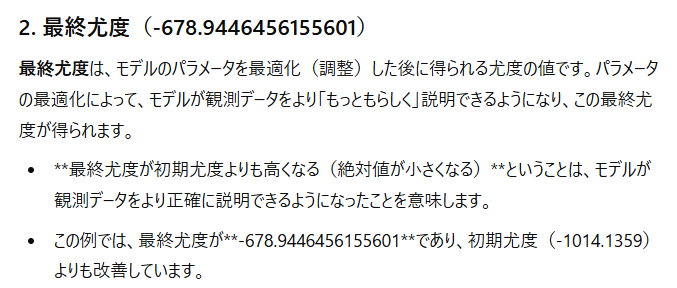
最終尤度: -678.9446456155601
ヘッセ行列:
? 65.36993168992923 -11.368683772161605 0 5.684341886080802 -5.684341886080802 17.053025658242408 -1082.867129298393 378.00873542437336?
? -11.368683772161605 105.16032489249484 0 -14.210854715202005 -14.210854715202005 -19.89519660128281 -9362.111086375082 1477.9288903810086?
? 0 0 0 0 0 0 0 0?
? 5.684341886080802 -14.210854715202005 0 73.89644451905043 -5.684341886080802 28.42170943040401 -2611.9550966541287 -335.37617127876734?
? -5.684341886080802 -14.210854715202005 0 -5.684341886080802 181.89894035458568 -93.79164112033324 -2444.267011014745 -3129.2302082874817?
? 17.053025658242408 -19.89519660128281 0 28.42170943040401 -93.79164112033324 184.74111129762608 15529.622032772751 1568.8783605583014?
? -1082.867129298393 -9362.111086375082 0 -2611.9550966541287 -2444.267011014745 15529.622032772751 1.0605450029288478e+07 -26716.40686457977?
? 378.00873542437336 1477.9288903810086 0 -335.37617127876734 -3129.2302082874817 1568.8783605583014 -26716.40686457977 102005.51514572?
diag: 65.36993168992923
diag: 105.16032489249484
diag: 0
diag: 73.89644451905043
diag: 181.89894035458568
diag: 184.74111129762608
diag: 1.0605450029288478e+07
diag: 102005.51514572
t値: [0.27283268674968236 0.4899627491877213 NaN 0.5670961673406928 0.5233519195569353 0.4461558961138306 2.2512263380604414e-07 0.00010138601282162748]
尤度比: 0.3305
補正済み尤度比: 0.3226
ーーーーー
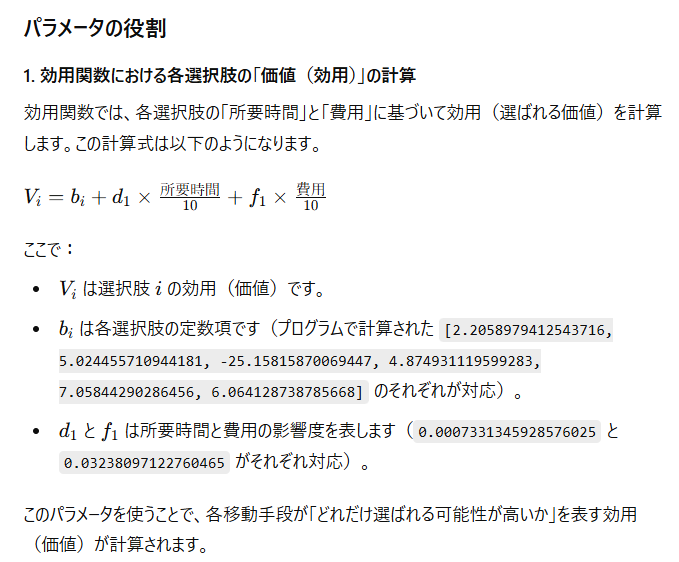
これを説明すると、
2.2058979412543716 → b_taxi
5.024455710944181 → b_drv
-25.15815870069447 → b_bike
(以下省略)
となっており、
0.0007331345928576025 → d1
0.03238097122760465 → f1
効用関数は、次のようになります。
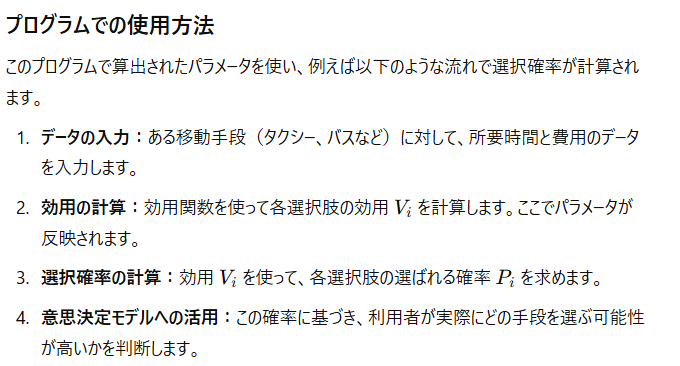
で、これをどう使うかは、以下の通り(ここからは分かった→シミュレータで使い倒すところ)
で、最後にパラメータの説明ですが、
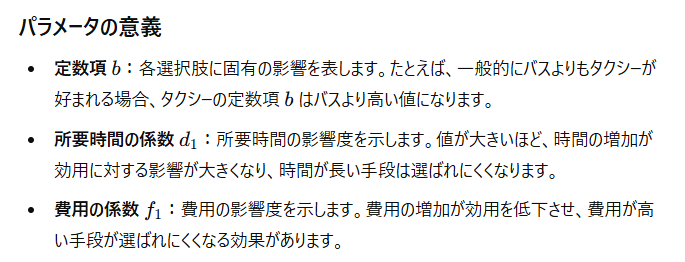
となるようです。
ーーーーーーー
初期尤度: -1014.1359 と 最終尤度: -678.9446456155601の意味と意義は以下の通り。
======
今回の計算では、初期尤度: -1014.1359 に対して、最終尤度: -678.9446456155601が小さくなっているので、パラメータを使った方が良い、というのは理解できました。その場合、この
尤度比: 0.3305
および
補正済み尤度比: 0.3226
は何を表わしているか、は以下の通り。
======
負数値がついているので分かりにくいけど、
初期尤度: -1014.1359 → 最終尤度: -678.9446456155601 は、値が335も大きくなったということになります
======
尤度をもっとも簡単に説明する方法
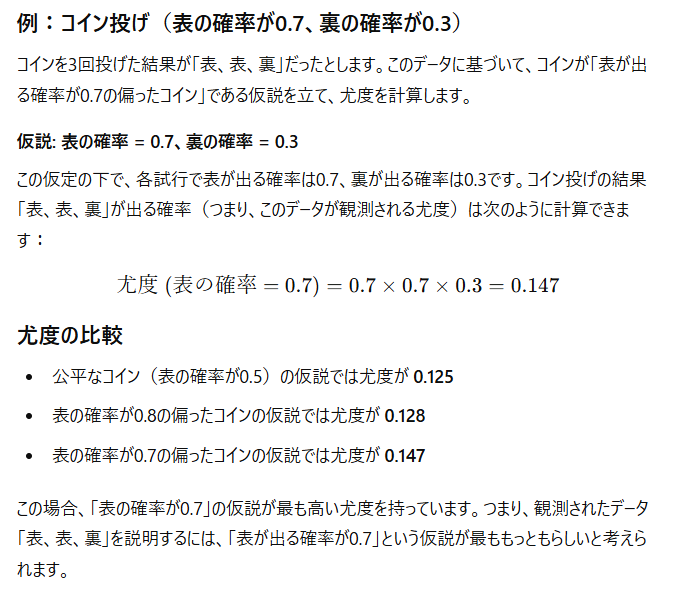
つまるところ、偏ったコインを作る = パラメータをつけくわえる、という理解で良いようです。
=====
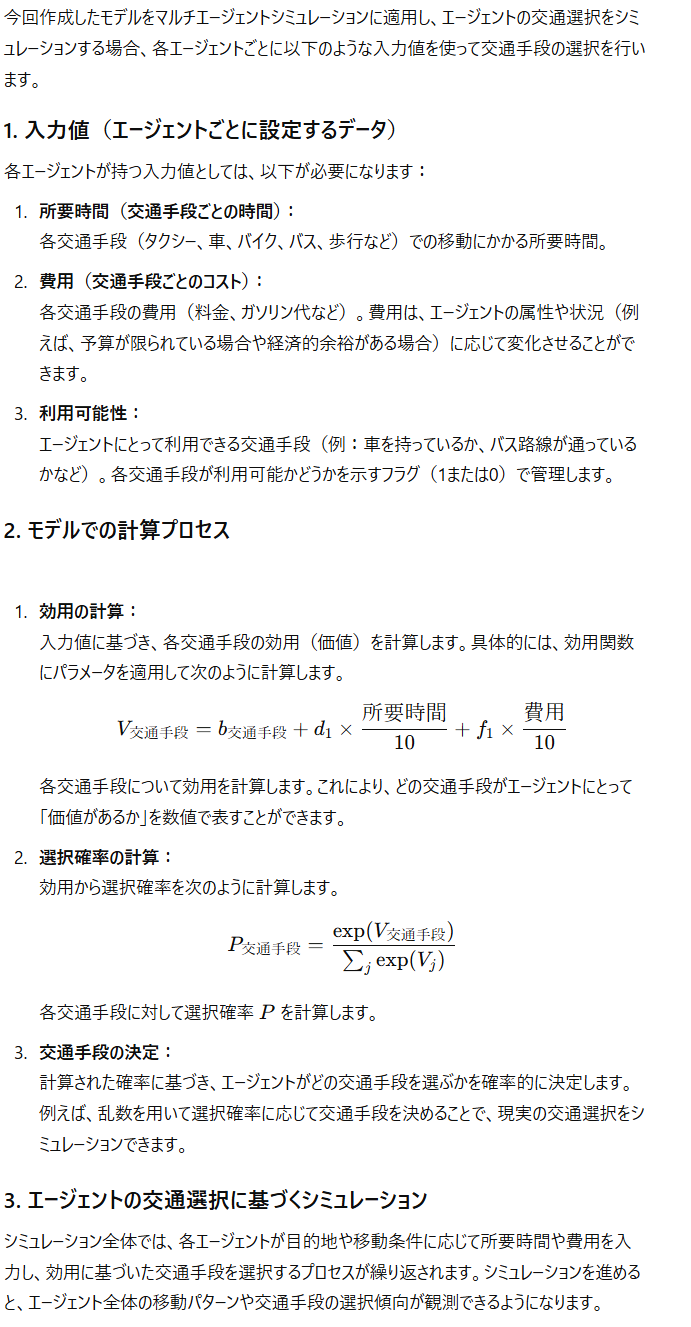
ところで、今回作成して頂いたモデルでマルチエージェントシミュレーションのエージェントに適用させたい場合、何を入力値として、エージェントの交通選択を選ぶことになるか?
"所要時間"と"費用"を入力値とすれば良い。
t値: [0.27283268674968236 0.4899627491877213 NaN 0.5670961673406928 0.5233519195569353 0.4461558961138306 2.2512263380604414e-07 0.00010138601282162748] のように値が小さいです
t値を大きくするためには、以下の3つの具体的なアプローチが考えられます。それぞれ、具体例を交えて説明します。
1. 標本数を増やす
標本数(サンプル数)を増やすと、t値が増加する可能性が高まります。これは、標本数が増えることで推定の**標準誤差が小さく**なり、結果としてt値が大きくなるためです。
- 例: ある多項ロジットモデルで、交通手段の選択確率を説明するための「時間」と「費用」の変数があるとします。最初のサンプル数が50の場合、時間の係数に対するt値が1.8で有意ではなかったとします。標本数を100に増やすと、標準誤差が小さくなり、同じ係数であってもt値が2.5になり、有意となる可能性が高まります。
2. 変数のスケールを調整する
変数のスケールを調整することで、標準誤差を減らしt値を大きくすることができます。特に、変数の分布が狭い範囲に集中している場合、その変数をスケール調整すると係数の推定がより安定します。
- 例: 収入に関するデータが1000円単位で表されているとします。この場合、係数の標準誤差が大きくなりやすいことがあります。これを1万円単位にスケール変換すると、収入の変動がモデルに対してより明確に影響し、標準誤差が小さくなることでt値が増える可能性があります。
3. 説明変数の分散を大きくする
説明変数の値が全体として似通っている場合(例えば、分散が小さい場合)、t値が小さくなりやすいです。このため、変数の分散を増やすようにデータを調整することも効果的です。可能であれば、サンプルに多様な値を含むようにデータを収集します。
- 例: 交通手段の選択モデルにおいて「通勤距離」を変数に入れたとします。もしすべてのサンプルがほぼ同じ距離(例えば、全員が2~3 kmの範囲)であれば、分散が少なくt値も小さくなります。データ収集の際に5~10 kmなどの多様な距離を持つサンプルを増やすことで、距離の変化に応じた係数の影響が明確になり、t値が大きくなることが期待できます。
これくさいなぁ。今回の移動距離は、高々1km以内だったからなぁ。終端距離まで入れると変わるかもしれん
---
これらの方法は、すべて統計的にt値を大きくするために役立ちますが、注意が必要です。無理にt値を大きくすることは、分析結果の解釈を歪める可能性もあるため、変数やデータの内容、意味を十分に理解した上で適用することが重要です。

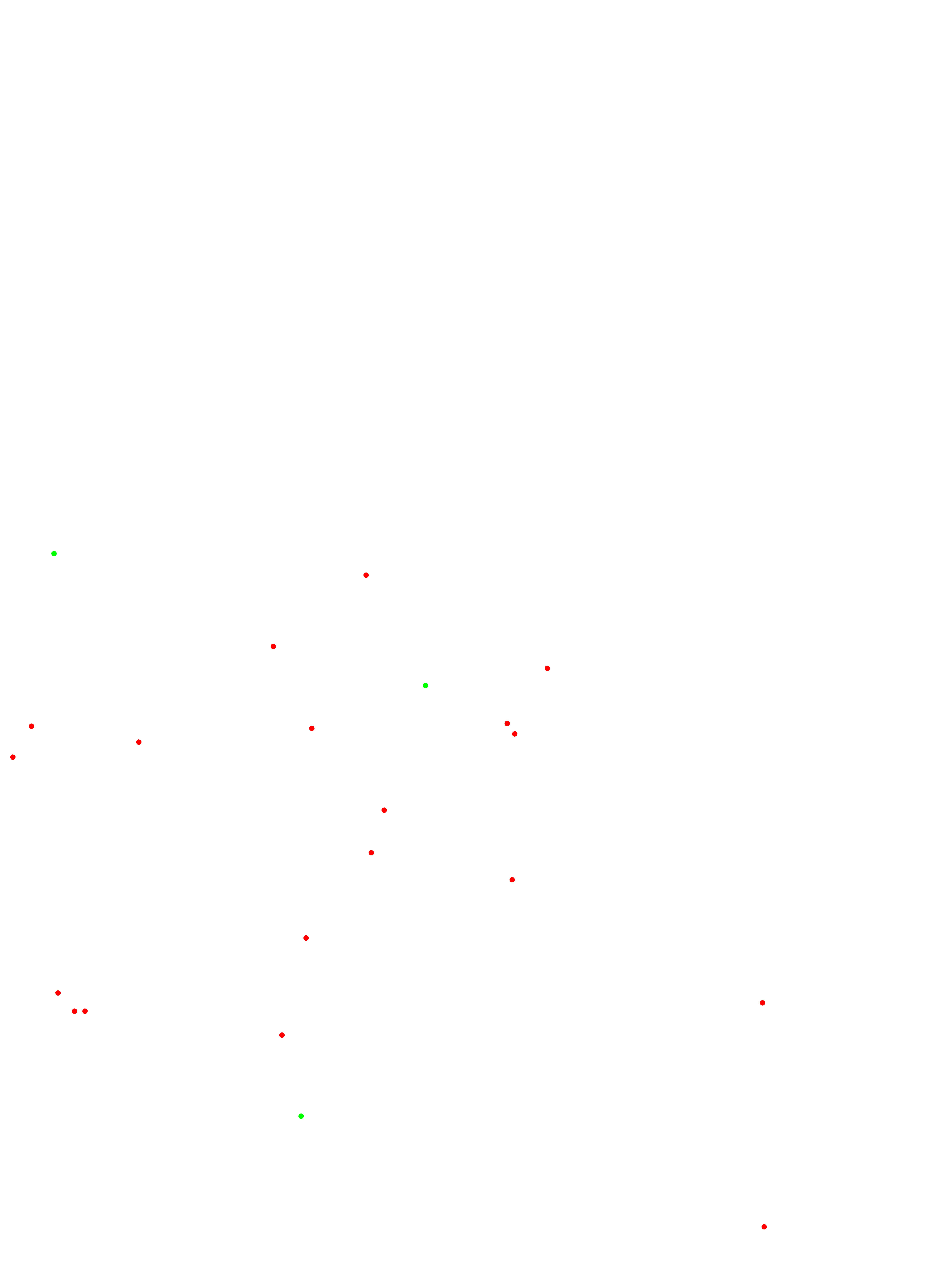
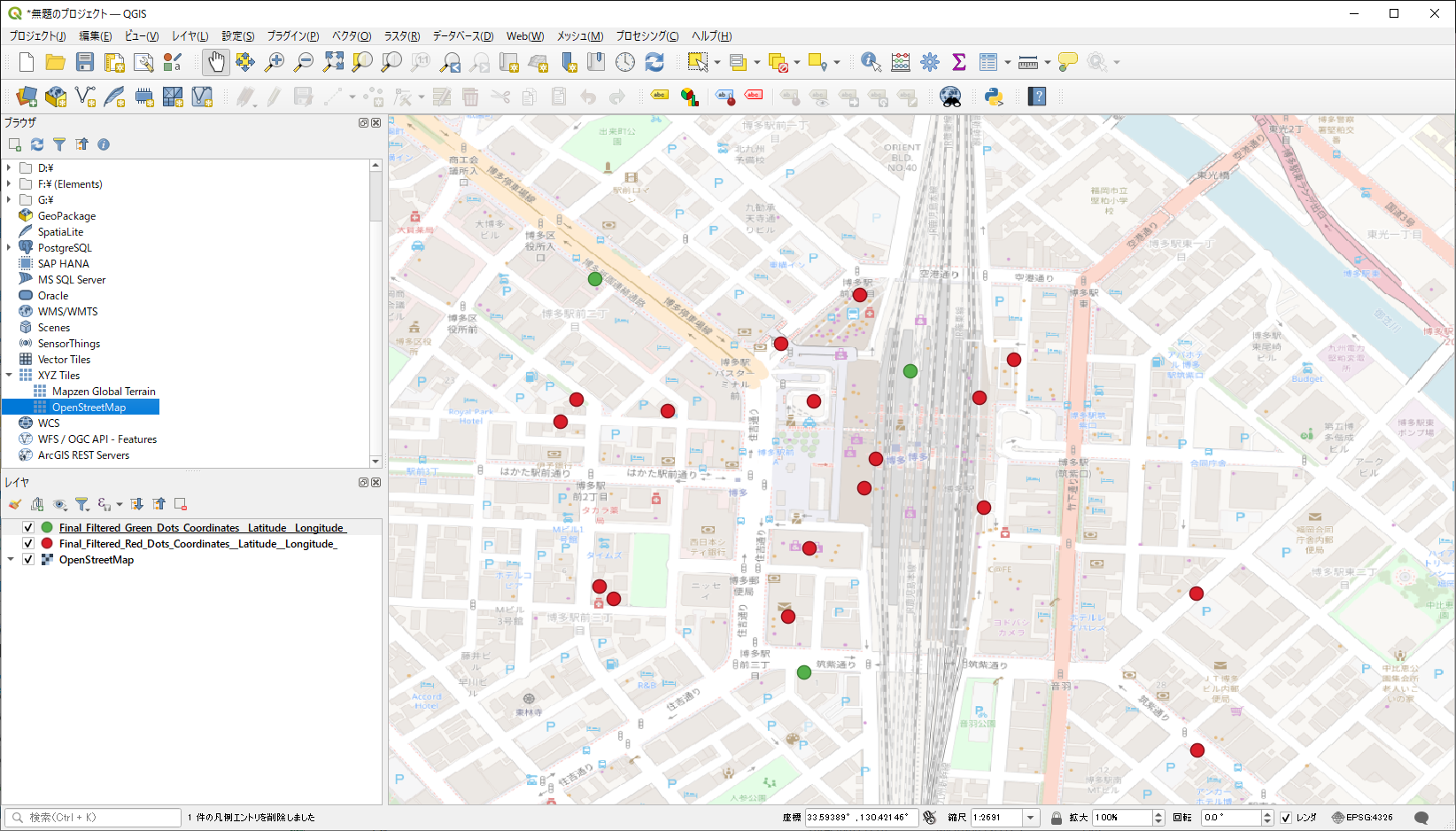
 まあ、ランダムウォークという感じではないですが、私たちが移動するときも、まあ、こんな感じだと思うので、とりあえずこれで進めようかなと思います。
まあ、ランダムウォークという感じではないですが、私たちが移動するときも、まあ、こんな感じだと思うので、とりあえずこれで進めようかなと思います。