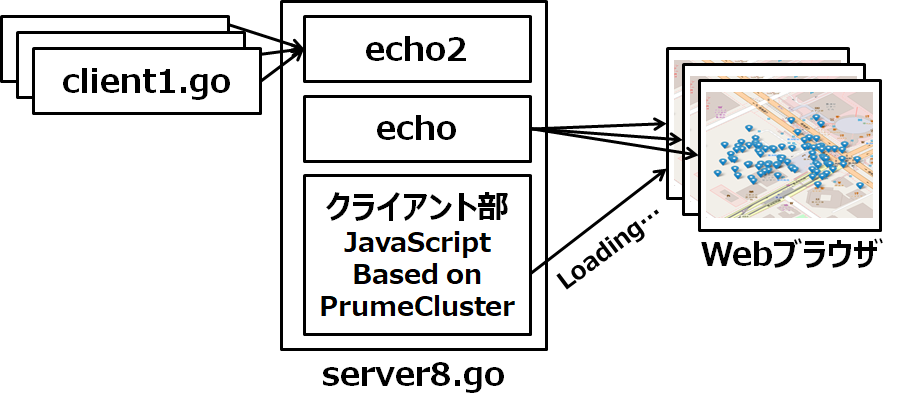
goルーチン対応完了。通信情報を全部ルーチンの中に突っ込んで、さらにサーバの方を、リクエストを一回つだけしか受けつけないようにミューテックスでロックしてみた。ただし動作は、まだ不安定。
/*
// server12.go ペアはclient7.go
// Copyright 2015 The Gorilla WebSocket Authors. All rights reserved.
// Use of this source code is governed by a BSD-style
// license that can be found in the LICENSE file.
// +build ignore
// 使い方
// go run server9.go (適当なシェルから)
// http://localhost:8080 (ブラウザ起動)
*/
package main
import (
"flag"
"fmt"
"html/template"
"log"
"net/http"
"sync"
"github.com/gorilla/websocket"
)
// GetLoc GetLoc
type GetLoc struct {
ID int `json:"id"`
Lat float64 `json:"lat"`
Lng float64 `json:"lng"`
//Address string `json:"address"`
}
//var addr = flag.String("addr", "localhost:8080", "http service address")
var addr = flag.String("addr", "0.0.0.0:8080", "http service address") // テスト
var upgrader = websocket.Upgrader{} // use default options
var chan2_1 = make(chan GetLoc)
var maxid = 0
var mutex sync.Mutex
func echo2(w http.ResponseWriter, r *http.Request) {
c, err := upgrader.Upgrade(w, r, nil) // cはサーバのコネクション
if err != nil {
log.Print("upgrade:", err)
return
}
defer c.Close()
//mutex := new(sync.Mutex)
for {
//mt, message, err := c.ReadMessage() // クライアントからのメッセージの受信(mtはクライアント識別子)
//_, _, err := c.ReadMessage() // クライアントからのメッセージの受信(mtはクライアント識別子)
mutex.Lock()
gl := new(GetLoc)
err := c.ReadJSON(&gl) // クライアントからのメッセージの受信
// 原因不明の対処処理
if gl.ID == 0 && gl.Lat < 0.01 && gl.Lng < 0.01 {
mutex.Unlock()
break
} else if gl.ID < -1 { // 受理できないメッセージとして返信する
//条件分岐 (変なIDが付与されているメッセージは潰す)
//if (gl.ID > maxid) || (gl.ID < -1) { // 受理できないメッセージとして返信する
gl.ID = -1
gl.Lat = -999
gl.Lng = -999
err2 := c.WriteJSON(gl)
if err2 != nil {
log.Println("write:", err2)
break
}
} else { // それ以外は転送する
log.Printf("echo2 after c.WriteJSON(gl) ID:%d", gl.ID)
log.Printf("echo2 after c.WriteJSON(gl) Lat:%f", gl.Lat)
log.Printf("echo2 after c.WriteJSON(gl) Lng:%f", gl.Lng)
if err != nil {
log.Println("read:", err)
break
}
fmt.Printf("echo2 before chan2_1 <- *gl\n")
chan2_1 <- *gl
fmt.Printf("echo2 after chan2_1 <- *gl\n")
//で、ここで受けとる
//gl2 := new(GetLoc)
fmt.Printf("echo2 before gl2 := <-chan2_1\n")
gl2 := <-chan2_1
maxid = gl2.ID // ID最大値の更新
log.Printf("echo2 after gl2 := <-chan2_1 ID:%d", gl2.ID)
log.Printf("echo2 after gl2 := <-chan2_1 Lat:%f", gl2.Lat)
log.Printf("echo2 after gl2 := <-chan2_1 Lng:%f", gl2.Lng)
fmt.Printf("echo2 before err2 := c.WriteJSON(gl2)\n")
err2 := c.WriteJSON(gl2)
fmt.Printf("echo2 after err2 := c.WriteJSON(gl2)\n")
if err2 != nil {
log.Println("write:", err2)
break
}
fmt.Printf("end of echo2\n")
}
mutex.Unlock()
}
}
func echo(w http.ResponseWriter, r *http.Request) {
c, err := upgrader.Upgrade(w, r, nil) // cはサーバのコネクション
if err != nil {
log.Print("upgrade:", err)
return
}
defer c.Close()
/* ここでロックして待つ */
for {
fmt.Printf("echo before gl := <-chan2_1\n")
gl := <-chan2_1
fmt.Printf("echo after gl := <-chan2_1\n")
fmt.Printf("echo before err = c.WriteJSON(gl) gl2.id = %d\n", gl.ID)
fmt.Printf("echo before err = c.WriteJSON(gl) gl2.lat = %f\n", gl.Lat)
fmt.Printf("echo before err = c.WriteJSON(gl) gl2.lng= %f\n", gl.Lng)
err = c.WriteJSON(gl)
if err != nil {
log.Println("WriteJSON:", err)
}
fmt.Printf("echo after err = c.WriteJSON(gl)\n")
fmt.Printf("echo before err = c.RreadJSON(gl)\n")
gl2 := new(GetLoc)
err2 := c.ReadJSON(&gl2)
fmt.Printf("echo after err = c.ReadJSON(&gl2) gl2.id = %d\n", gl2.ID)
fmt.Printf("echo after err = c.ReadJSON(&gl2) gl2.lat = %f\n", gl2.Lat)
fmt.Printf("echo after err = c.ReadJSON(&gl2) gl2.lng= %f\n", gl2.Lng)
if err2 != nil {
log.Println("ReadJSON:", err2)
}
// ここからチャネルで返す
fmt.Printf("echo before chan2_1 <- *gl2 gl2.id = %d\n", gl2.ID)
fmt.Printf("echo before chan2_1 <- *gl2 gl2.lat = %f\n", gl2.Lat)
fmt.Printf("echo before chan2_1 <- *gl2 gl2.lng = %f\n", gl2.Lng)
chan2_1 <- *gl2
fmt.Printf("echo after chan2_1 <- *gl2\n")
fmt.Printf("end of echo\n")
}
}
func home(w http.ResponseWriter, r *http.Request) {
homeTemplate.Execute(w, "ws://"+r.Host+"/echo")
}
func main() {
flag.Parse()
log.SetFlags(0)
http.HandleFunc("/echo2", echo2) // echo関数を登録 (サーバとして必要)
http.HandleFunc("/echo", echo) // echo関数を登録 (サーバとして必要)
http.HandleFunc("/", home) // home関数を登録
log.Fatal(http.ListenAndServe(*addr, nil)) // localhost:8080で起動をセット
}
var homeTemplate = template.Must(template.New("").Parse(`
<!DOCTYPE html>
<html lang="en">
<head>
<meta charset="utf-8" />
<title>PruneCluster - Realworld 50k</title>
<link rel="stylesheet" href="https://cdnjs.cloudflare.com/ajax/libs/leaflet/1.0.0-beta.2.rc.2/leaflet.css"/>
<script src="https://cdnjs.cloudflare.com/ajax/libs/leaflet/1.0.0-beta.2.rc.2/leaflet.js"></script>
<script src="http://kobore.net/PruneCluster.js"></script> <!-- これ、いずれローカルホストから取れるように換える -->
<link rel="stylesheet" href="http://kobore.net/examples.css"/> <!-- これも、いずれローカルホストから取れるように換える -->
<!-- goのテンプレートのローカルって、どこになるんだろう? -->
</head>
<body>
<div id="map"></div>
<script>
ws = new WebSocket("{{.}}"); // websocketの確立
/*
var print = function(message) {
var d = document.createElement("div");
d.textContent = message;
output.appendChild(d);
};
*/
// 引数にはミリ秒を指定。(例:5秒の場合は5000)
function sleep(a){
var dt1 = new Date().getTime();
var dt2 = new Date().getTime();
while (dt2 < dt1 + a){
dt2 = new Date().getTime();
}
return;
}
var map = L.map("map", {
attributionControl: false,
zoomControl: false
}).setView(new L.LatLng(35.654543, 139.795534), 18);
L.tileLayer('http://{s}.tile.osm.org/{z}/{x}/{y}.png', {
detectRetina: true,
maxNativeZoom: 18
}).addTo(map);
var leafletView = new PruneClusterForLeaflet(1,1); // (120,20)がデフォルト
ws.onopen = function (event) {
}
var markers = [];
// 受信すると、勝手にここに飛んでくる
ws.onmessage = function (event) {
// データをJSON形式に変更
var obj = JSON.parse(event.data);
console.log("233");
console.log(obj.id);
console.log(obj.lat);
console.log(obj.lng);
if (obj.id == 0){ // idが未登録の場合
console.log("obj.id == 0")
// データをマーカーとして登録
var marker = new PruneCluster.Marker(obj.lat, obj.lng);
console.log(marker.hashCode);
markers.push(marker);
leafletView.RegisterMarker(marker);
console.log(markers);
console.log(markers.length)
obj.id = marker.hashCode;
//ws.send(marker.hashCode); // テキスト送信
var json_obj = JSON.stringify(obj);
ws.send(json_obj);
} else if ((Math.abs(obj.lat) > 90.0) || (Math.abs(obj.lng) > 180.0)){ // 異常な座標が入った場合は、マーカーを消去する
console.log("Math.abs(obj.lat) > 180.0)")
for (let i = 0; i < markers.length; ++i) {
if (obj.id == markers[i].hashCode){
console.log(i)
console.log(obj.id)
console.log("obj.id == markers[i].hashCode")
leafletView.RemoveMarkers(markers[obj.id]);
//leafletView.RemoveMarkers(markers[i-1]);
//leafletView.RemoveMarkers(markers);
break;
}
}
obj.lat = 91.0;
obj.lng = 181.0;
var json_obj = JSON.stringify(obj);
ws.send(json_obj);
} else {
// 位置情報更新
console.log("else")
for (let i = 0; i < markers.length; ++i) {
if (obj.id == markers[i].hashCode){
var ll = markers[i].position;
ll.lat = obj.lat;
ll.lng = obj.lng;
break;
}
}
var json_obj = JSON.stringify(obj);
ws.send(json_obj);
}
}
// 位置情報の更新
window.setInterval(function () {
leafletView.ProcessView(); // 変更が行われたときに呼び出されれなければならない
}, 500);
// サーバを止めると、ここに飛んでくる
ws.onclose = function(event) {
//print("CLOSE");
ws = null;
}
map.addLayer(leafletView);
</script>
</body>
</html>
`))// client7.go ペアは server12.go
package main
import (
"flag"
"log"
"net/url"
"github.com/gorilla/websocket"
"math/rand"
"time"
)
// GetLoc GetLoc
type GetLoc struct {
ID int `json:"id"`
Lat float64 `json:"lat"`
Lng float64 `json:"lng"`
//Address string `json:"address"`
}
var addr = flag.String("addr", "0.0.0.0:8080", "http service address") // テスト
func random(min, max float64) float64 {
return rand.Float64()*(max-min) + min
}
func main() {
for i := 1; i < 100; i++ {
go passenger(i)
}
time.Sleep(25 * time.Second)
}
func passenger(count int) {
//var addr = flag.String("addr", "0.0.0.0:8080", "http service address") // テスト
//var addr = flag.String("addr", "localhost:8080", "http service address") // テスト
//var upgrader = websocket.Upgrader{} // use default options
_ = websocket.Upgrader{} // use default options
rand.Seed(time.Now().UnixNano())
flag.Parse()
log.SetFlags(0)
u := url.URL{Scheme: "ws", Host: *addr, Path: "/echo2"}
log.Printf("connecting to %s", u.String())
c, _, err := websocket.DefaultDialer.Dial(u.String(), nil)
if err != nil {
log.Fatal("dial:", err)
}
defer c.Close()
gl := GetLoc{
ID: 0,
Lat: 35.653976,
Lng: 139.796821,
}
log.Printf("count:%d before 1 ID:%d", count, gl.ID)
log.Printf("count:%d before 1 Lat:%f", count, gl.Lat)
log.Printf("count:%d before 1 Lng:%f", count, gl.Lng)
//err = c.WriteJSON(mt, gl)
err = c.WriteJSON(gl)
if err != nil {
log.Println("write:", err)
}
gl2 := new(GetLoc)
err = c.ReadJSON(gl2)
log.Printf("count:%d after1 ID:%d", count, gl2.ID)
log.Printf("count:%d after1 Lat:%f", count, gl2.Lat)
log.Printf("count:%d after1 Lng:%f", count, gl2.Lng)
gl.ID = gl2.ID
for i := 0; i < 20; i++ {
gl.Lat += random(0.5, -0.5) * 0.00001 * 10 * 5
gl.Lng += random(0.5, -0.5) * 0.00002 * 10 * 5
log.Printf("count:%d-%d before 2 ID:%d", count, i, gl.ID)
log.Printf("count:%d-%d before 2 Lat:%f", count, i, gl.Lat)
log.Printf("count:%d-%d before 2 Lng:%f", count, i, gl.Lng)
err = c.WriteJSON(gl)
if err != nil {
log.Println("write:", err)
}
gl2 := new(GetLoc)
err = c.ReadJSON(gl2)
log.Printf("count:%d-%d after 2 ID:%d", count, i, gl2.ID)
log.Printf("count:%d-%d after 2 Lat:%f", count, i, gl2.Lat)
log.Printf("count:%d-%d after 2 Lng:%f", count, i, gl2.Lng)
time.Sleep(1 * time.Second) // 1秒休む
}
gl.ID = gl2.ID
gl.Lat = 999.9
gl.Lng = 999.9
log.Printf("count:%d before 3 ID:%d", count, gl.ID)
log.Printf("count:%d before 3 Lat:%f", count, gl.Lat)
log.Printf("count:%d before 3 Lng:%f", count, gl.Lng)
err = c.WriteJSON(gl)
err = c.ReadJSON(gl2)
log.Printf("count:%d after3 ID:%d", count, gl2.ID)
log.Printf("count:%d after3 Lat:%f", count, gl2.Lat)
log.Printf("count:%d after3 Lng:%f", count, gl2.Lng)
}