映像の切り出しをするだけなら、aviutl(現在立ち上げ不調) ではなく avidemux を試してみなさい > 私
無限ループのgoroutineも止めることができるcontext.Context
私の作るエージェントプログラムは、エージェントが数千~数万回のレベルで発生ー消滅をするものなので、エジェントの消滅時に、確実にgoroutineを消滅させる必要があります。
しかし無限ループでイベント待ちをしているgoroutineを止める方法で、苦慮してきたのですが、問答無用でgoroutineを潰す、context.Contextというものを見つけて ―― 『これまでの苦労は一体なんだったんだ』と思っています。
まあ、こういうことって、結構ありますけどね。
package main
import (
"context"
"fmt"
"time"
)
func main() {
ctx, cancel := context.WithCancel(context.Background())
go loop(ctx)
// 2.5秒待つ
time.Sleep(2500 * time.Millisecond)
// ここで loop() を止める
cancel()
// 2回呼び出しても大丈夫
cancel()
println("finish")
}
// 無限ループする関数
func loop(ctx context.Context) {
for {
fmt.Println("test")
time.Sleep(time.Second)
}
}親から子どもを一斉に消滅させる方法については、明日、片付けます。
なお、こっちの defer cancel()を使う方がスマートです。
package main
import (
"context"
"fmt"
"time"
)
func main() {
ctx, cancel := context.WithCancel(context.Background())
go loop(ctx)
defer cancel()
// 2.5秒待つ
time.Sleep(2500 * time.Millisecond)
println("finish")
}
// 無限ループする関数
func loop(ctx context.Context) {
for {
fmt.Println("test")
time.Sleep(time.Second)
}
}
"Mouse without Borders"で、複数PCを1つのマウスとキーボードで使う
ホストのPCでは"No"を選択
"No"を押した後の情報をメモっておく
クライアントPCの方は"yes"を選択する。
ホストの方で示された情報を入力する。
うーん、ラクチン。
昨夜windows7を使ったら、その反応の早さに驚いたので、windows10はやっぱり遅いんだなと思ったが、ちゃんとチューニングしたらいきなり快適になった件
昨夜windows7を使ったら、その反応の早さに驚いたので、windows10はやっぱり遅いんだなと思ったが、ちゃんとチューニングしたらいきなり快適になりました。
- 高速スタートアップの無効化
- 「コントロールパネル」→「システムとセキュリティ」→「電源オプション(電源ボタンの動作の変更)」→「現在利用可能ではない設定を変更します」→「高速スタートアップを有効にする」→チェックボックスを外す
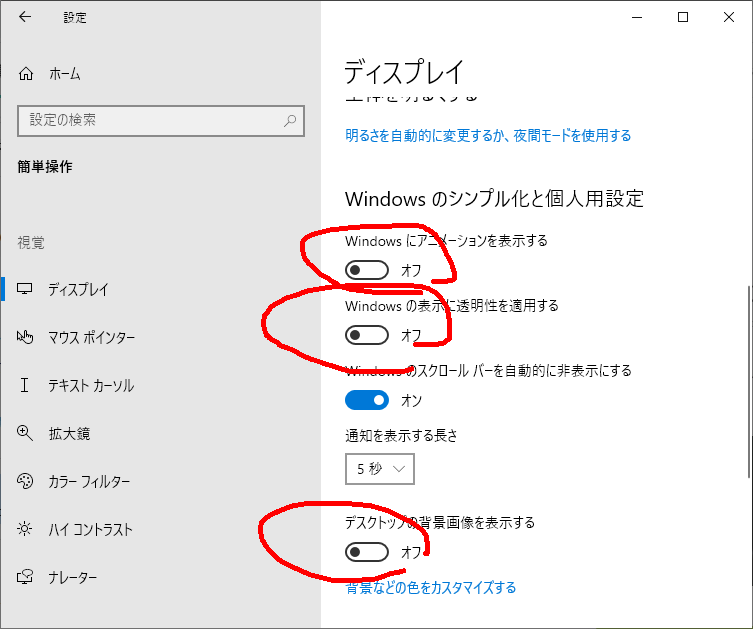
- アニメーションの無効化
- 「スタートメニュー」→「設定」→「簡単操作」→「その他のオプション」→「Windowsでアニメーションを再生する」→「オフ」
- その他、以下のようにした
-
- 電源プランで「高パフォーマンス」を選択
- 「コントロールパネル」→「ハードウェアとサウンド」→「電源オプション」→「電源プランの選択またはカスタマイズ」→「追加プラン(高パフォーマンス)」
ノートPCの場合は、やめた方がいいかもしれない。
- 「コントロールパネル」→「ハードウェアとサウンド」→「電源オプション」→「電源プランの選択またはカスタマイズ」→「追加プラン(高パフォーマンス)」
ただ、このあと問題が出てきたのは、デスクトップに表示される文字がガタガタになる、ということでした。
これは耐えられなかったので、ClearTypeというものを適用されることで解決しました。
- ClearTypeテキストの調整
- [コントロールパネル]→「デスクトップのカスタマイズ」→「フォント」→「ClearTypeテキストの調整」で、あと色々いじっていると、文字のガタガタが直った
「Windows10はやっぱり遅い」と決めつけずに、ちょっとした工夫で、ストレス解消になりますので、お勧めます。
あと、https://ygkb.jp/4475 の内容を参照させて頂いた
「無効」を推奨
ActiveX Installer (AxInstSV)
Application Management
BranchCache
Certificate Propagation # これは残した 個人的なプログラムで認証作業をやっているので
Connected User Experiences and Telemetry
Data Collection Publishing Service
Distributed Link Tracking Client
Distributed Transaction Coordinator
Downloaded Maps Manager
Fax
Function Discovery Provider Host
Function Discovery Resource Publication
Geolocation Service
Home Group Listener
Home Group Provider
Internet Connection Sharing (ICS)
Microsoft App-V Client
Microsoft iSCSI Initiator Service
Net.Tcp Port Sharing Service
Offline Files
Peer Name Resolution Protocol
Peer Networking Grouping
Peer Networking Identity Manager
PNRP Machine Name Publication Service
Portable Device Enumerator Service
Print Spooler
Printer Extensions and Notifications
Remote Registry
Routing and Remote Access
Shared PC Account Manager
Smart Card
Smart Card Device Enumeration Service
Smart Card Removal Policy
SNMP Trap
SSDP Discovery
UPnP Device Host
Windows Media Player Network Sharing Service
Windows Remote Management (WS-Management)
WinHTTP Web Proxy Auto-Discovery Service
Xbox Live Auth Manager
Xbox Live セーブ データ
Xbox Live ネットワーキング サービス
タイムゾーンの自動更新機能
ユーザー エクスペリエンス仮想化サービス
市販デモ サービス
SensorDataService
Sensor Monitoring Service
Sensor Service
「手動」を推奨
AllJoyn Router Service
Application Identity
BitLocker Drive Enctyption Service
Block Level Backup Engine Service
Bluetooth Handsfree Service
Bluetooth サポート サービス
Diagnostic Policy Service
Diagnostic Service Host
Diagnostic System Host
SensorDataService
Sensor Monitoring Service
Sensor Service
Telephony
Windows Image Acquisition (WIA)
強化学習シミュレーション
/*
gcc -g ql_test.cpp -o ql_test
強化学習(Q-Learning)を理解する為に、中学→高校→大学の学歴を使ってみた
*/
#include <stdio.h>
#include <stdlib.h>
typedef enum period{
BIRTH = 0, JUNIOR_HIGH = 1, HIGH = 2, COLLEGE = 3, SUPER_COLLEGE = 4
}PERIOD;
typedef struct state{
struct state* future_state[2]; // 未来へのパス(取り敢えず2つほど)
PERIOD period;
int q;
}STATE;
STATE* change_state(STATE* p_state)
{
if ((double)rand()/RAND_MAX < 0.3){ // ε:0.3
if ((double)rand()/RAND_MAX < 0.5){ // 半々
return p_state->future_state[0];
}
else{
return p_state->future_state[1];
}
}
else {
if (p_state->future_state[0]->q > p_state->future_state[1]->q){
return p_state->future_state[0];
}
else{
return p_state->future_state[1];
}
}
}
void q_renewal(STATE* p_state)
{
int dummy_q;
if (p_state->period == SUPER_COLLEGE){
p_state->q += 0.1 * (1000- p_state->q); // α:0.1 報酬の源泉:年収1000万円
}
else if (p_state->period != COLLEGE){
if (p_state->future_state[0]->q > p_state->future_state[1]->q){
dummy_q = p_state->future_state[0]->q;
}
else {
dummy_q = p_state->future_state[1]->q;
}
p_state->q += 0.1 * (0.9 * dummy_q - p_state->q); // α:0.1 γ:0.9
}
return;
}
void q_display(STATE* p_state)
{
for (int i =0; i < 15 ; i++){
printf("%d,", p_state->q);
p_state++;
}
printf("\n");
return;
}
int main()
{
srand(13);
// 初期設定
//STATE* state;
STATE state[15];
state[0].period = BIRTH;
state[0].future_state[0] = &(state[1]);
state[0].future_state[1] = &(state[2]);
state[1].period = JUNIOR_HIGH;
state[1].future_state[0] = &(state[3]);
state[1].future_state[1] = &(state[4]);
state[2].period = JUNIOR_HIGH;
state[2].future_state[0] = &(state[5]);
state[2].future_state[1] = &(state[6]);
state[3].period = HIGH;
state[3].future_state[0] = &(state[7]);
state[3].future_state[1] = &(state[8]);
state[4].period = HIGH;
state[4].future_state[0] = &(state[9]);
state[4].future_state[1] = &(state[10]);
state[5].period = HIGH;
state[5].future_state[0] = &(state[11]);
state[5].future_state[1] = &(state[12]);
state[6].period = HIGH;
state[6].future_state[0] = &(state[13]);
state[6].future_state[1] = &(state[14]);
state[7].period = COLLEGE;
state[8].period = COLLEGE;
state[9].period = COLLEGE;
state[10].period = SUPER_COLLEGE;
state[11].period = COLLEGE;
state[12].period = COLLEGE;
state[13].period = COLLEGE;
state[14].period = COLLEGE;
for (int i = 0; i < 15; i++){
state[i].q = (int)rand() % 100;
}
printf("誕生,A中学,B中学,C高校,D高校,E高校,F高校,G大学,H大学,I大学,J大学,K大学,L大学,M大学,N大学\n");
STATE* s = state;
//q_display(s);
q_display(state);
for (int i = 0; i < 1000; i++){ // 300:学習回数
STATE* s = state; // 初期値に戻しているだけ
do{
s = change_state(s);
q_renewal(s);
}while( (s->period != COLLEGE) && (s->period != SUPER_COLLEGE));
q_display(state);
}
printf("\n[after]\n");
//q_display(s);
q_display(state);
}
副業シミュレーション
/*
gcc -g second_job.cpp -o second_job
考え方
(1)8時間労働、8時間睡眠、8時間余暇を基本として考える。
(2)8時間余暇の中には、通勤時間1.5時間 食事時間1.5時間が含まれるものとする
(3)とすれば、残りの余暇5時間をどのような使い方をするのかが問題となる。
(4)十分な余暇は、基本的に正業のパフォーマンスを上げるものであるとする。
(4)余暇を使った副業は、収入になるものとする
*/
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
typedef struct person {
double first_business_hour;
double sleep_hour;
double commute_time;
double meal_time;
double max_remain_time;
double second_business_hour;
double final_remain_time;
double fb_fee;
double sb_fee;
double fatigue_func;
double cost;
struct person *prev; /* 前の構造体を示すポインタ */
struct person *next; /* 次の構造体を示すポインタ */
} PERSON;
double min(double a, double b)
{
if (a > b)
return b;
else
return a;
}
double diff(double a, double b)
{
if (a > b)
return a - b;
else
return 0;
}
double fatigue_func(double time)
{
if (time < 1.0){
return 0.5;
}
else if ((time >= 1.0) && (time < 3.0)){
return (1.0 - 0.5)/(3.0 - 1.0) * (time - 1.0) + 0.5;
}
else {
return 1.0;
}
}
const double First_Business_hourly_fees = 2000;
const double First_Business_extra_fees = First_Business_hourly_fees * 1.25;
const double Second_Business_hourly_fees = 1000;
int main()
{
srand(13);
PERSON* first_p_person= (PERSON*)malloc(sizeof(PERSON));
PERSON* last_p_person= (PERSON*)malloc(sizeof(PERSON));
PERSON* p_prev_person = first_p_person;
for (int i = 0; i < 100; i++){
PERSON* p_person= (PERSON*)malloc(sizeof(PERSON));
memset(p_person, 0, sizeof(PERSON));
//////// ポインタの貼り替え //////////
p_prev_person->next = p_person;
p_person->next = last_p_person;
p_person->prev = p_prev_person;
p_prev_person = p_person;
//////////////////////////////////////
p_person->first_business_hour = 8.0 + 2.0 * (double)rand()/RAND_MAX; // 8~10時間
p_person->first_business_hour = 8.0; // 8~10時間
p_person->sleep_hour = 7.0 + 1.0 * (1.0 - 2.0 * (double)rand()/RAND_MAX); // 6~8時間
p_person->commute_time = 1.0 + 0.5 * (1.0 - 2.0 * (double)rand()/RAND_MAX); // 0.5~1.5時間
p_person->meal_time = 1.0 + 0.5 * (1.0 - 2.0 * (double)rand()/RAND_MAX); // 0.5~1.5時間
p_person->max_remain_time =
24.0 -
p_person->first_business_hour -
p_person->sleep_hour -
p_person->commute_time -
p_person->meal_time; // 最悪でも3時間の、最良で9時間の余暇時間ができる
#if 1
p_person->second_business_hour = p_person->max_remain_time * (double)rand()/RAND_MAX; //余暇の時間を適当に振る
#else
p_person->second_business_hour = 0;
#endif
p_person->final_remain_time = p_person->max_remain_time - p_person->second_business_hour;
p_person->fb_fee =
min(p_person->first_business_hour, 8.0) * First_Business_hourly_fees +
diff(p_person->first_business_hour, 8.0) * First_Business_extra_fees;
p_person->sb_fee = p_person->second_business_hour * Second_Business_hourly_fees;
p_person->fatigue_func = fatigue_func(p_person->final_remain_time);
p_person->cost =
p_person->fb_fee * p_person->fatigue_func + p_person->sb_fee;
//printf("%d:cost = %f\n", i, p_person->cost);
}
double total_cost = 0.0;
PERSON* p_person = first_p_person->next;
printf("本業時間,睡眠時間,通勤時間,食事時間,余暇時間,副業時間,残余暇時間,RATIO,収入\n");
while(p_person->next != last_p_person){
total_cost += p_person->cost;
printf("%f,%f,%f,%f,%f,%f,%f,%f,%f\n",
p_person->first_business_hour,
p_person->sleep_hour,
p_person->commute_time,
p_person->meal_time,
p_person->max_remain_time,
p_person->second_business_hour,
p_person->final_remain_time,
p_person->fatigue_func,
p_person->cost
);
p_person = p_person->next;
}
printf("total cost = %f\n", total_cost);
}
非正規社員シミュレーション
/*
gcc -g hiseiki3.cpp -o hiseiki3
*/
/*
まず「基本形」を崩す
非正規社員投入の方針は、
(1)潜在的な市場が増加中なら投入
(2)赤字に転じたら、直ちに非正規社員を全員解雇
という極めて単純なもの
に、
非正規社員を保護する
最低3年間は解雇できないもの、としてみる
*/
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <math.h>
typedef struct person{
int age; // 20歳~60歳 のいずれか
int position; // 1:正規社員 0:非正規社員
double productivity; // 生産力 正規社員の場合
///////////
struct person *prev; /* 前の構造体を示すポインタ */
struct person *next; /* 次の構造体を示すポインタ */
} PERSON;
typedef struct company{
int payroll;
double productivity; // 会社としての生産力の合計
} COMPANY;
PERSON *p_first_person, *p_last_person; //社員リスト(あえてグローバルで保持)
// 社員用リストの先頭と終端を作成するルーチン
/*
リストの先頭と終端をはグローバルでも良いのであるが、
一応、メインルーチンの方で、陽に定義できるように、
ここでは、返り値としている
*/
double min(double a, double b){
if (b > a)
return a;
else
return b;
};
double juglar_cycles(int year)
{
// 10年で変動するsin周期
// ベースとするのは2017年とする(単なる仮説)
int x = (year -7) % 10;
double y = sin( (double)x /10.0 * 2 * 3.141592654);
return y;
}
void init_person_list(PERSON **p_first_person, PERSON **p_last_person)
{
PERSON *p_top_person = (PERSON *)malloc(sizeof(PERSON));
if(p_top_person == NULL) {
printf("メモリが確保できません\n");
exit(EXIT_FAILURE);
}
memset(p_top_person, 0, sizeof(PERSON)); // ゼロクリア
PERSON *p_tail_person = (PERSON *)malloc(sizeof(PERSON));
if(p_tail_person == NULL) {
printf("メモリが確保できません\n");
exit(EXIT_FAILURE);
}
memset(p_tail_person, 0, sizeof(PERSON)); // ゼロクリア
*p_first_person = p_top_person;
*p_last_person = p_tail_person;
(*p_first_person)->prev = NULL;
(*p_last_person)->next = NULL;
(*p_first_person)->next = (*p_last_person);
(*p_last_person)->prev = (*p_first_person);
return;
}
// 社員オブジェクトを生成して、社員用リストに追加するルーチン
void add_person(PERSON *p_ref_person)
{
PERSON *new_p_person = (PERSON *)malloc(sizeof(PERSON));
if(new_p_person == NULL) {
printf("メモリが確保できません\n");
exit(EXIT_FAILURE);
}
memset(new_p_person, 0, sizeof(PERSON)); // ゼロクリア
memcpy(new_p_person, p_ref_person, sizeof(PERSON)); // 引数の動的メモリの内容コピー
// personの追加属性記述ここから
// personの追加属性記述ここまで
PERSON *p_person = p_last_person->prev;
p_person->next = new_p_person;
new_p_person->prev = p_person;
p_last_person->prev = new_p_person;
new_p_person->next = p_last_person;
return;
}
void delete_person(PERSON *p_person)
{
// ポインタを貼り替えて
p_person->prev->next = p_person->next;
p_person->next->prev = p_person->prev;
// そのメモリを解放する
free(p_person);
return;
}
int main()
{
double potential = juglar_cycles(2017) * 1500.0 + 7500.0;
double border = 7000.0; // 利益のボーダー(固定と考える)
COMPANY company;
company.productivity = 7437.500000; // 生産力初期値
// 社員格納用リストの作成
init_person_list(&p_first_person, &p_last_person);
//20歳から59歳までの正規社員、各世代100人づつ、合計4000人を作成する
/////// PERSONを作成する ///////
for (int age = 20; age < 60; age ++){
for (int i = 0; i < 100; i++){
PERSON person;
person.age = age;
person.position = 1; // 1:正規社員 0:非正規社員
person.productivity = 1.25 + (2.50 -1.25) / 40.0 * ((double)age -20.0); //20歳 1.25 60歳 2.50まで線形変化
add_person(&person);
}
}
/////// PERSONを作成する ///////
double sum_profit = 0;
for ( int year = 2017; year < 2040; year++){
//// 年齢を1歳加算し、定年
// ===== PERSON ループを回す========
PERSON* p_person = p_first_person->next;
while (p_person != p_last_person){
p_person->age += 1;
if (p_person->position == 1){ // 正規社員であれば、生産力は年齢とともに高くなる(という仮説)
p_person->productivity = 1.25 + (2.50 -1.25) / 40.0 * ((double)(p_person->age) -20.0); //20歳 1.25 60歳 2.50まで線形変化
}
else if (p_person->position == 0){ // 非正規社員であれば、生産力は年齢と関係なく高くならない(という仮説)
p_person->productivity = 1.0;
}
if (p_person->age >= 60){ // 60歳になったら定年(正規社員だろうが、非正規社員だろうが)
delete_person(p_person);
}
p_person = p_person->next;
}
// ===== PERSON ループを回す(ここまで)========
//// 100人の20歳の新入社員を入社する
for (int i = 0; i < 100; i++){
/////// PERSONを作成する ///////
PERSON person;
person.age = 20;
person.position = 1; // 1:正規社員 0:非正規社員
person.productivity = 1.25 + (2.50 -1.25) / 40.0 * ((double)person.age -20.0); //20歳 1.25 60歳 2.50まで線形変化
add_person(&person);
}
#if 1
// 昨年の景気ラインと昨年の生産力を比較して、景気ライン > 昨年の生産力 となっていたら、非正規社員を必要分だけ投入する
int add_person_number;
if (potential > company.productivity){
add_person_number = (int)(potential - company.productivity);
}
// printf("potential = %f, company.productivity = %f, add_person_number=%d\n",potential, company.productivity, add_person_number);
for (int i=0; i < add_person_number; i++){
PERSON person;
person.age = 20; // 若い奴を突っ込むことにする
person.position = 0; // 1:正規社員 0:非正規社員
person.productivity = 1.0; // 生産力は"1.0"で固定、かつ年齢とともに成長しない)
add_person(&person);
}
// 昨年の景気ラインと利益のボーダを比較して 、景気ライン < 利益のボーダ となっていたら、非正規社員を全て即時に解雇する
if (potential - border < 0.0){
// ===== PERSON ループを回す========
p_person = p_first_person->next;
while (p_person != p_last_person){
if (p_person->position == 0){ // 非正規社員
if (p_person->age > 25){
delete_person(p_person);
}
}
p_person = p_person->next;
}
// ===== PERSON ループを回す(ここまで)========
}
#endif //0
potential = juglar_cycles(year) * 1500.0 + 7500.0; // 景気ライン(ジャグラーサイクル)の更新
/////////// ここから生産力算出ループ
company.productivity = 0; // 生産力ゼロリセット
company.payroll = 0 ; // 従業員数ゼロリセット
// ===== PERSON ループを回す========
p_person = p_first_person->next;
while (p_person != p_last_person){
company.payroll += 1 ; // 従業員数一人加算
company.productivity += p_person->productivity; // 生産力加算
p_person = p_person->next;
}
// ===== PERSON ループを回す(ここまで)========
//printf("company.payroll = %d\n",company.payroll); // company.payroll = 4000
//printf("company.productivity = %f\n",company.productivity); // company.productivity = 7437.500000
double profit = min(company.productivity, potential) - border;
sum_profit += profit;
//printf("year = %d company.productivity = %f potential = %f profit = %f sum_profit=%f payroll=%d\n",year,company.productivity, potential, profit,sum_profit,company.payroll);
printf("%d,%f,%f,%f,%f,%d\n",year,company.productivity, potential, profit,sum_profit,company.payroll);
} // for ( int year = 2017; year < 2040; year++){
return 0;
}
外国人就労拡大で際立つ日本の「ブラック国家ぶり」 のシミュレーション
/*
g++ -g specific_skill2.cpp -o specific_skill2
*/
/*
*/
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <math.h>
typedef struct person{
int age;
int type1_lifetime; // 1号の残り時間
int retirement_age; // 65歳で引退
///////////
struct person *prev; /* 前の構造体を示すポインタ */
struct person *next; /* 次の構造体を示すポインタ */
} PERSON;
int int_max(int a, int b)
{
if (a < b)
return b;
else
return a;
}
PERSON *p_first_person, *p_last_person;
void init_person_list(PERSON **p_first_person, PERSON **p_last_person)
{
PERSON *p_top_person = (PERSON *)malloc(sizeof(PERSON));
if(p_top_person == NULL) {
printf("メモリが確保できません\n");
exit(EXIT_FAILURE);
}
memset(p_top_person, 0, sizeof(PERSON)); // ゼロクリア
PERSON *p_tail_person = (PERSON *)malloc(sizeof(PERSON));
if(p_tail_person == NULL) {
printf("メモリが確保できません\n");
exit(EXIT_FAILURE);
}
memset(p_tail_person, 0, sizeof(PERSON)); // ゼロクリア
*p_first_person = p_top_person;
*p_last_person = p_tail_person;
(*p_first_person)->prev = NULL;
(*p_last_person)->next = NULL;
(*p_first_person)->next = (*p_last_person);
(*p_last_person)->prev = (*p_first_person);
return;
}
void add_person(PERSON *p_ref_person)
{
PERSON *new_p_person = (PERSON *)malloc(sizeof(PERSON));
if(new_p_person == NULL) {
printf("メモリが確保できません\n");
exit(EXIT_FAILURE);
}
memset(new_p_person, 0, sizeof(PERSON)); // ゼロクリア
memcpy(new_p_person, p_ref_person, sizeof(PERSON)); // 引数の動的メモリの内容コピー
// personの追加属性記述ここから
// personの追加属性記述ここまで
PERSON *p_person = p_last_person->prev;
p_person->next = new_p_person;
new_p_person->prev = p_person;
p_last_person->prev = new_p_person;
new_p_person->next = p_last_person;
return;
}
void delete_person(PERSON *p_person)
{
// ポインタを貼り替えて
p_person->prev->next = p_person->next;
p_person->next->prev = p_person->prev;
// そのメモリを解放する
free(p_person);
return;
}
int type1(int k){
int number = 40000 + 4000 * (k - 2019);
if (number > 60000){
number = 60000;
}
return number;
}
// 2.1.1 C言語のrand関数を用いた方法
double Uniform( void ){
return ((double)rand()+1.0)/((double)RAND_MAX+2.0);
}
// 3.3. 正規分布・ガウス分布 (Normal Distribution)
double rand_normal( double mu, double sigma ){
double z=sqrt( -2.0*log(Uniform()) ) * sin( 2.0*M_PI*Uniform() );
return mu + sigma*z;
}
int main()
{
srand(13);
// 社員格納用リストの作成
init_person_list(&p_first_person, &p_last_person);
int pass1_number;
for (int i = 2019; i < 2080; i++){
// for (int i = 2019; i < 2200; i++){
// 1号試験パス者の生成
pass1_number = type1(i);
for (int k = 0; k < pass1_number; k++){
PERSON person;
person.age = int_max((int)rand_normal(26.0, 3.5), 18); // 18歳以下は応募できない
// printf("person.age = %d\n",person.age);
person.type1_lifetime = 5;
person.retirement_age = 65;
add_person(&person);
} // for (int k = 0, k < type1(k); k++)
// 1号試験パス者の生成(ここまで)
// ===== PERSON ループを回す========
PERSON* p_person = p_first_person->next;
while (p_person != p_last_person){
// 1号 強制帰国
if (p_person->type1_lifetime == 0){ // 5年を使い果した
if (Uniform() <= 0.4){ // 2号合格率 40%
p_person->type1_lifetime = -1; // 免責フラグ
}
else{
PERSON* p_person_prev = p_person->prev;
delete_person(p_person);
p_person = p_person_prev;
}
}
if (p_person->age > 65){ // 65歳以上になったら、強制帰国
PERSON* p_person_prev = p_person->prev;
delete_person(p_person);
p_person = p_person_prev;
}
// 次のループに回る
p_person = p_person->next;
}
p_person = p_first_person->next;
while (p_person != p_last_person){
// 1号 強制帰国を迎えるまでのタイムリミットを減らす
if (p_person->type1_lifetime != -1){
p_person->type1_lifetime -= 1;
}
// 全員の年齢の加算
p_person->age += 1;
// 次のループに回る
p_person = p_person->next;
}
int type1_person_count = 0;
int type2_person_count = 0;
p_person = p_first_person->next;
while (p_person != p_last_person){
if (p_person->type1_lifetime != -1)
type1_person_count += 1;
else
type2_person_count += 1;
p_person = p_person->next;
}
//printf("i:%d, type1:%d, type2:%d\n", i, type1_person_count, type2_person_count);
printf("%d, %d, %d, %d\n",
i,
type1_person_count,
type2_person_count,
type1_person_count + type2_person_count);
}// for (int i = 2019; i < 2100; i++){
return 0;
}
「上司の帰宅が遅れると、社員の帰宅も遅れる」の仮説検証プログラム
/*
g++ -g seat.cpp -o seat
*/
/*
「上司の帰宅が遅れると、社員の帰宅も遅れる」の仮説検証
*/
#include <stdio.h>
#include <stdlib.h>
#include <math.h>
// 共通関数
double max(double a){
return a;
}
double max(double a, double b){
if (a > b)
return a;
else
return b;
};
double max(double a, double b, double c ){
return max(max(a,b), max(b,c));
};
double max(double a, double b, double c, double d ){
return max(max(a,b,c), d);
};
double min(double a){
return a;
}
double min(double a, double b){
if (b > a)
return a;
else
return b;
};
double min(double a, double b, double c ){
return min(min(a,b), min(b,c));
};
double min(double a, double b, double c, double d ){
return min(min(a,b,c), d);
};
// ファジィ表現
typedef enum scale {LESSLESS, LESS, ZERO, MORE, MOREMORE} SCALE;
// 前件部メンバーシップ関数(山3つ)クラス
class condition_MF3
{
private:
double center;
double width;
SCALE express;
public:
condition_MF3(double _center, double _witdth, SCALE _express){
center = _center;
width = _witdth;
express = _express;
// 使用できないファジィ表現を使った場合は止める
if ((express == LESSLESS) || (express == MOREMORE)){
printf("wrong expression used \n");
exit(0);
}
};
double func(double _x);
};
double condition_MF3::func(double _x)
{
// x,yは、メンバーシップ関数上の座標を示す
double x = _x;
double y = 0.0; // yの値は、必ず0以上1以下になる
if (express == LESS){
if (x <= center - width){
y = 1.0;
}
else if (x <= center){
y = - 1.0 / width * (x - center);
}
else{
y = 0.0;
}
}
else if (express == ZERO){
if (x <= center - width){
y = 0.0;
}
else if (x <= center){
y = 1.0 / width * (x - center) + 1.0;
}
else if (x <= center + width){
y = -1.0 / width * (x - center) + 1.0;
}
else{
y = 0.0;
}
}
else if (express == MORE){
if (x <= center){
y = 0.0;
}
else if (x <= center + width){
y = 1.0 / width * (x - center);
}
else{
y = 1.0;
}
}
else {
printf("wrong expression\n");
exit(1);
}
return y;
};
// 前件部メンバーシップ関数(山5つ)クラス
class condition_MF5
{
private:
double center;
double width;
SCALE express;
public:
condition_MF5(double _center, double _witdth, SCALE _express){
center = _center;
width = _witdth;
express = _express;
};
double func(double _x);
};
double condition_MF5::func(double _x)
{
// x,yは、メンバーシップ関数上の座標を示す
double x = _x;
double y = 0.0; // yの値は、必ず0以上1以下になる
if (express == LESSLESS){
if (x <= center - 2.0 * width){
y = 1.0;
}
else if (x <= center - width){
y = - 1.0 / width * (x - (center - 2.0 * width)) + 1.0;
}
else{
y = 0.0;
}
}
else if (express == LESS){
if (x <= center - 2.0 * width){
y = 0.0;
}
else if (x <= center - width){
y = 1.0 / width * (x - (center - width)) + 1.0;
}
else if (x <= center){
y = -1.0 / width * (x - (center - width)) + 1.0;
}
else{
y = 0.0;
}
}
else if (express == ZERO){
if (x <= center - width){
y = 0.0;
}
else if (x <= center){
y = 1.0 / width * (x - center) + 1.0;
}
else if (x <= center + width){
y = -1.0 / width * (x - center) + 1.0;
}
else{
y = 0.0;
}
}
else if (express == MORE){
if (x <= center){
y = 0.0;
}
else if (x <= center + width){
y = 1.0 / width * (x - (center + width)) + 1.0;
}
else if (x <= center + 2.0 * width){
y = -1.0 / width * (x - (center + width)) + 1.0;
}
else{
y = 0.0;
}
}
else if (express == MOREMORE){
if (x <= center + width){
y = 0.0;
}
else if (x <= center + 2.0 * width){
y = 1.0 / width * (x - (center + 2.0 * width)) + 1.0;
}
else{
y = 1.0;
}
}
return y;
};
// 後件部メンバーシップ関数(山3つ)クラス
class action_MF3
{
private:
double center;
double width;
SCALE express;
double x;
double y;
public:
action_MF3(double _center, double _witdth, SCALE _express){
y = 0.0; // yの値は、必ず0以上1以下になる
center = _center;
width = _witdth;
express = _express;
if (express == LESS){
x = center - width;
}
else if (express == ZERO){
x = center;
}
else if (express == MORE){
x = center + width;
}
else{
printf("wrong scale expression\n");
exit(0);
}
};
// Y座標の値を最大値で更新する
void func_Max(double b){
y = max(b, y);
};
// Y座標の値をリセット(y=0)する
void func_Reset(){
y = 0.0;
};
// X座標を返す
double func_X(void){
return x;
};
// (最大値で更新された、最後の)Y座標を返す
double func_Y(){
return y;
};
};
// 後件部メンバーシップ関数(山5つ)クラス
class action_MF5
{
private:
double center;
double width;
SCALE express;
double x;
double y;
public:
action_MF5(double _center, double _witdth, SCALE _express){
y = 0.0; // yの値は、必ず0以上1以下になる
center = _center;
width = _witdth;
express = _express;
if (express == LESSLESS){
x = center - 2.0 * width;
}
else if (express == LESS){
x = center - width;
}
else if (express == ZERO){
x = center;
}
else if (express == MORE){
x = center + width;
}
else if (express == MOREMORE){
x = center + 2.0 * width;
}
else{
printf("wrong scale expression\n");
exit(-1); // 強制終了
}
};
// Y座標の値を最大値で更新する
void func_Max(double b){
y = max(b, y);
};
// Y座標の値をリセット(y=0)する
void func_Reset(){
y = 0.0;
};
// X座標を返す
double func_X(void){
return x;
};
// (最大値で更新された、最後の)Y座標を返す
double func_Y(){
return y;
};
};
typedef enum post{
HEAD = 1, // 部長
CHIEF = 2, // 課長
STAFF = 3 // 平社員
} POST;
typedef struct person{
int absences; // 0:帰宅、 1:残業
char name[10];
int section;
int number;
POST post;
double p_x;
double p_y;
double expected_return_time; // 17.5(17:30)から、21.0(21:00)までの時間)
double going_home_ratio;
} PERSON;
const int SECTION = 6;
const int MEMBER = 8;
const int ALL_PERSON_COUNTER = 49; // 6つの課、それぞれ8人と部長
PERSON person[] = {
{1,"部長",-1,-1, HEAD, 0.0, 0.0},
{1,"社員", 0, 0, STAFF, 3.5 + 0.0 + 0.0, -4.4 + 0.0 + 0.0},
{1,"社員", 0, 1, STAFF, 3.5 + 0.0 + 1.2, -4.4 + 0.0 + 0.0},
{1,"社員", 0, 2, STAFF, 3.5 + 0.0 + 2.4, -4.4 + 0.0 + 0.0},
{1,"社員", 0, 3, STAFF, 3.5 + 0.0 + 3.6, -4.4 + 0.0 + 0.0},
{1,"課長", 0, 4, CHIEF, 3.5 + 0.0 + 0.0, -4.4 + 0.0 + 2.0},
{1,"社員", 0, 5, STAFF, 3.5 + 0.0 + 1.2, -4.4 + 0.0 + 2.0},
{1,"社員", 0, 6, STAFF, 3.5 + 0.0 + 2.4, -4.4 + 0.0 + 2.0},
{1,"社員", 0, 7, STAFF, 3.5 + 0.0 + 3.6, -4.4 + 0.0 + 2.0},
{1,"社員", 1, 0, STAFF, 3.5 + 4.8 + 0.0, -4.4 + 0.0 + 0.0},
{1,"社員", 1, 1, STAFF, 3.5 + 4.8 + 1.2, -4.4 + 0.0 + 0.0},
{1,"社員", 1, 2, STAFF, 3.5 + 4.8 + 2.4, -4.4 + 0.0 + 0.0},
{1,"課長", 1, 3, CHIEF, 3.5 + 4.8 + 3.6, -4.4 + 0.0 + 0.0},
{1,"社員", 1, 4, STAFF, 3.5 + 4.8 + 0.0, -4.4 + 0.0 + 2.0},
{1,"社員", 1, 5, STAFF, 3.5 + 4.8 + 1.2, -4.4 + 0.0 + 2.0},
{1,"社員", 1, 6, STAFF, 3.5 + 4.8 + 2.4, -4.4 + 0.0 + 2.0},
{1,"社員", 1, 7, STAFF, 3.5 + 4.8 + 3.6, -4.4 + 0.0 + 2.0},
{1,"社員", 2, 0, STAFF, 3.5 + 0.0 + 0.0, -4.4 + 3.4 + 0.0},
{1,"社員", 2, 1, STAFF, 3.5 + 0.0 + 1.2, -4.4 + 3.4 + 0.0},
{1,"課長", 2, 2, CHIEF, 3.5 + 0.0 + 2.4, -4.4 + 3.4 + 0.0},
{1,"社員", 2, 3, STAFF, 3.5 + 0.0 + 3.6, -4.4 + 3.4 + 0.0},
{1,"社員", 2, 4, STAFF, 3.5 + 0.0 + 0.0, -4.4 + 3.4 + 2.0},
{1,"社員", 2, 5, STAFF, 3.5 + 0.0 + 1.2, -4.4 + 3.4 + 2.0},
{1,"社員", 2, 6, STAFF, 3.5 + 0.0 + 2.4, -4.4 + 3.4 + 2.0},
{1,"社員", 2, 7, STAFF, 3.5 + 0.0 + 3.6, -4.4 + 3.4 + 2.0},
{1,"社員", 3, 0, STAFF, 3.5 + 4.8 + 0.0, -4.4 + 3.4 + 0.0},
{1,"社員", 3, 1, STAFF, 3.5 + 4.8 + 1.2, -4.4 + 3.4 + 0.0},
{1,"社員", 3, 2, STAFF, 3.5 + 4.8 + 2.4, -4.4 + 3.4 + 0.0},
{1,"社員", 3, 3, STAFF, 3.5 + 4.8 + 3.6, -4.4 + 3.4 + 0.0},
{1,"社員", 3, 4, STAFF, 3.5 + 4.8 + 0.0, -4.4 + 3.4 + 2.0},
{1,"社員", 3, 5, STAFF, 3.5 + 4.8 + 1.2, -4.4 + 3.4 + 2.0},
{1,"課長", 3, 6, CHIEF, 3.5 + 4.8 + 2.4, -4.4 + 3.4 + 2.0},
{1,"社員", 3, 7, STAFF, 3.5 + 4.8 + 3.6, -4.4 + 3.4 + 2.0},
{1,"課長", 4, 0, CHIEF, 3.5 + 0.0 + 0.0, -4.4 + 6.8 + 0.0},
{1,"社員", 4, 1, STAFF, 3.5 + 0.0 + 1.2, -4.4 + 6.8 + 0.0},
{1,"社員", 4, 2, STAFF, 3.5 + 0.0 + 2.4, -4.4 + 6.8 + 0.0},
{1,"社員", 4, 3, STAFF, 3.5 + 0.0 + 3.6, -4.4 + 6.8 + 0.0},
{1,"社員", 4, 4, STAFF, 3.5 + 0.0 + 0.0, -4.4 + 6.8 + 2.0},
{1,"社員", 4, 5, STAFF, 3.5 + 0.0 + 1.2, -4.4 + 6.8 + 2.0},
{1,"社員", 4, 6, STAFF, 3.5 + 0.0 + 2.4, -4.4 + 6.8 + 2.0},
{1,"社員", 4, 7, STAFF, 3.5 + 0.0 + 3.6, -4.4 + 6.8 + 2.0},
{1,"社員", 5, 0, STAFF, 3.5 + 4.8 + 0.0, -4.4 + 6.8 + 0.0},
{1,"社員", 5, 1, STAFF, 3.5 + 4.8 + 1.2, -4.4 + 6.8 + 0.0},
{1,"社員", 5, 2, STAFF, 3.5 + 4.8 + 2.4, -4.4 + 6.8 + 0.0},
{1,"社員", 5, 3, STAFF, 3.5 + 4.8 + 3.6, -4.4 + 6.8 + 0.0},
{1,"課長", 5, 4, CHIEF, 3.5 + 4.8 + 0.0, -4.4 + 6.8 + 2.0},
{1,"社員", 5, 5, STAFF, 3.5 + 4.8 + 1.2, -4.4 + 6.8 + 2.0},
{1,"社員", 5, 6, STAFF, 3.5 + 4.8 + 2.4, -4.4 + 6.8 + 2.0},
{1,"社員", 5, 7, STAFF, 3.5 + 4.8 + 3.6, -4.4 + 6.8 + 2.0},
};
double distance(PERSON* person1, PERSON* person2)
{
double d = 0.0;
d = pow((person1->p_x - person2->p_x),2.0);
d += pow((person1->p_y - person2->p_y),2.0);
d = sqrt(d);
return d;
}
int main()
{
PERSON* cheif[SECTION];
// 初期状態 (最初は個人の帰宅時間は、乱数で設定)
for (int i = 0; i < ALL_PERSON_COUNTER; i++){
// 各個人の帰宅時間を設定
person[i].expected_return_time = 17.5 + (21.0 -17.5) * rand()/ (1.0 + RAND_MAX);
// person[i].expected_return_time = 18.5;
// 各課の課長を選定(後で探すのが面倒なので)
if (person[i].post == CHIEF){
cheif[person[i].section] = &person[i];
}
}
/*
for (int i = 0; i < ALL_PERSON_COUNTER; i++){
printf("%d, expected_return_time = %f\n",i, person[i].expected_return_time);
printf("%d, expected_return_time = %d\n",i, person[i].absences);
}
*/
// 残業時間
condition_MF3 OverTime_Short(1.0, 2.0, LESS); // 1時間
condition_MF3 OverTime_Middle(1.0, 2.0, ZERO); // 2時間
condition_MF3 OverTime_Long(1.0, 2.0, MORE); // 3時間
// 部長からの距離
condition_MF3 DistanceFrom_HEAD_Near(7.0, 7.0, LESS); // 7メートル
condition_MF3 DistanceFrom_HEAD_Middle(7.0, 7.0, ZERO); // 14メートル
condition_MF3 DistanceFrom_HEAD_Far(7.0, 7.0, MORE); // 21メートル
// 課長からの距離
condition_MF3 DistanceFrom_CHIEF_Near(1.5, 1.5, LESS); // 1.5メートル
condition_MF3 DistanceFrom_CHIEF_Middle(1.5, 1.5, ZERO); // 3.0メートル
condition_MF3 DistanceFrom_CHIEF_Far(1.5, 1.5, MORE); // 4.5メートル
// 残っている課の人数
condition_MF3 Staying_COUNT_Less(2, 2, LESS); // 2人
condition_MF3 Staying_COUNT_Middle(2, 2, ZERO); // 4人
condition_MF3 Staying_COUNT_Many(2, 2, MORE); // 6人
// 帰宅度数
action_MF3 GoingHome_Hard(0.5, 0.5, LESS);// 帰宅度数 0.0 → 帰宅できない
action_MF3 GoingHome_Middle(0.5, 0.5, ZERO);// 帰宅度数 0.5 → 帰宅ボーダ
action_MF3 GoingHome_Easy(0.5, 0.5, MORE);// 帰宅度数 1.0 → 帰宅できる
double present_time =17.5;
while (present_time < 24.0){
present_time += 0.01; // 一番後ろで加算すると忘れそうなので
printf("present_time = %f\n", present_time);
// 部の中の課の全体状況の把握
if (person[0].expected_return_time < present_time){ // 部長は特別あつかい
person[0].absences = 0;
}
int staying_count[SECTION] ={}; // 各課(Section)で残っている人数を格納(最初はゼロリセット)
for (int i = 0; i < ALL_PERSON_COUNTER; i++){
if (person[i].absences == 1){
staying_count[person[i].section] += 1; // (Section)に一人追加
}
}
printf("time = %f, %d,%d,%d,%d,%d,%d\n",
present_time,
staying_count[0],
staying_count[1],
staying_count[2],
staying_count[3],
staying_count[4],
staying_count[5]);
for (int i = 1; i < ALL_PERSON_COUNTER; i++){ // person[0]の部長は神様→誰からも影響を受けない(とする)
/*
[ルール1]
全社員は、予定時間の1時間のまでの帰宅度数0.0
1時間から2時間までの帰宅度数0.5
2時間以上の帰宅度数1.0
*/
double r11 = min(OverTime_Short.func(present_time - person[i].expected_return_time));
GoingHome_Hard.func_Max(r11);
double r12 = min( OverTime_Middle.func(present_time - person[i].expected_return_time));
GoingHome_Middle.func_Max(r12);
double r13 = min(OverTime_Long.func(present_time - person[i].expected_return_time));
GoingHome_Easy.func_Max(r13);
if (person[i].post == CHIEF){ // 課長の場合の付加条件
/*
ルール2
部長が残っている場合、部長から5m以内の課長は、帰宅度数0.0
5m~10m以内の課長は、帰宅度数0.5
10m以上の課長は、帰宅度数1.0
*/
double dis = distance(&person[0], &person[i]);
double r21 = min((double)(person[0].absences), DistanceFrom_HEAD_Near.func(dis));
GoingHome_Hard.func_Max(r21);
double r22 = min((double)(person[0].absences), DistanceFrom_HEAD_Middle.func(dis));
GoingHome_Middle.func_Max(r22);
double r23 = min((double)(person[0].absences), DistanceFrom_HEAD_Far.func(dis));
GoingHome_Easy.func_Max(r23);
GoingHome_Middle.func_Max(r23);
}
if (person[i].post == STAFF){ // (ヒラ)社員の場合の付加条件
/*
ルール3
課長が残っている場合、課長から1.5m以内のメンバは、帰宅度数0.0
課長から3.0m以内のメンバは、帰宅度数0.5
課長から4.5m以内のメンバは、帰宅度数0.7
*/
double dis = distance(cheif[person[i].section], &person[i]);
double r31 = min((double)(cheif[person[i].section]->absences), DistanceFrom_CHIEF_Near.func(dis));
GoingHome_Hard.func_Max(r31);
double r32 = min((double)(cheif[person[i].section]->absences), DistanceFrom_CHIEF_Middle.func(dis));
GoingHome_Middle.func_Max(r32);
double r33 = min((double)(cheif[person[i].section]->absences), DistanceFrom_CHIEF_Far.func(dis));
GoingHome_Easy.func_Max(r33);
GoingHome_Middle.func_Max(r33);
}
#if 0
/*
ルール4
同じ課のメンバのの人数が、6人以上残っている場合は、帰宅度数0.3
4人残っている場合は、帰宅度数0.6
2人以下の場合は、帰宅度数1.0
*/
int num = staying_count[person[i].section];
double r41 = min(Staying_COUNT_Less.func((double)num));
GoingHome_Easy.func_Max(r41);
double r42 = min(Staying_COUNT_Middle.func((double)num));
GoingHome_Middle.func_Max(r42);
double r43 = min(Staying_COUNT_Many.func((double)num));
GoingHome_Hard.func_Max(r43);
#endif
/*
ルールに振れない場合は、min-max重心法の分母がゼロになり、
ゼロ割が発生する場合がある為、それを回避する
*/
double denominator = // 分母
GoingHome_Easy.func_Y() +
GoingHome_Middle.func_Y() +
GoingHome_Hard.func_Y();
double numerator = // 分子
GoingHome_Easy.func_X() * GoingHome_Easy.func_Y() +
GoingHome_Middle.func_X() * GoingHome_Middle.func_Y() +
GoingHome_Hard.func_X() * GoingHome_Hard.func_Y();
// 推論結果 (分母がゼロの場合は、推論結果は前回と同値とする)
if ( denominator != 0.0){
person[i].going_home_ratio = numerator / denominator ;
}
if (person[i].going_home_ratio > 0.5){
person[i].absences = 0; // 0:帰宅、 1:残業
}
// 後件部メンバーシップ関数のリセット(ループさせる時は必ずリセットする)
GoingHome_Easy.func_Reset();
GoingHome_Middle.func_Reset();
GoingHome_Hard.func_Reset();
}
}
for (int i = 0; i < ALL_PERSON_COUNTER; i++){
printf("%d, absences = %d\n",i, person[i].absences);
}
return 0;
}
1992年生まれから人口の100%がディジタルネイティブになったと仮定する。Q:日本のデジタルネイティブの比率は、どう変化していくだろうか
2/*
gcc -g birth_digital_native.cpp -o birth_digital_native
*/
/*
デジタルネイティブ
1992年生まれから人口の100%がディジタルネイティブになったと仮定する。Q:日本のデジタルネイティブの比率は、どう変化していくだろうか
*/
#include "stdio.h"
int main(int argc, char* argv[])
{
double men[101],women[101]; // 年齢別人口 平成22年データ 単位は1000人
double men_death_rate[101],women_death_rate[101]; // 死亡率 平成22年データ (資料 厚生労働省大臣官房統計情報部人口動態・保健統計課「人口動態統計」)
// ファイルデバイスとデータ形式の統一回避する為、データべた書き
men[ 0]=549 ; men_death_rate[ 0]=2.5/1000.0 ; // 男性0歳人口549千人、死亡率0.25% 2012年生まれ
men[ 1]=535 ; men_death_rate[ 1]=0.4/1000.0 ; //2011年生まれ
men[ 2]=535 ; men_death_rate[ 2]=0.2/1000.0 ; //2010年生まれ
men[ 3]=550 ; men_death_rate[ 3]=0.2/1000.0 ;
men[ 4]=548 ; men_death_rate[ 4]=0.2/1000.0 ;
men[ 5]=544 ; men_death_rate[ 5]=0.1/1000.0 ;
men[ 6]=542 ; men_death_rate[ 6]=0.1/1000.0 ;
men[ 7]=562 ; men_death_rate[ 7]=0.1/1000.0 ;
men[ 8]=574 ; men_death_rate[ 8]=0.1/1000.0 ;
men[ 9]=589 ; men_death_rate[ 9]=0.1/1000.0 ; //2003年生まれ
men[10]=597 ; men_death_rate[10]=0.1/1000.0 ; //2002年生まれ
men[11]=604 ; men_death_rate[11]=0.1/1000.0 ;
men[12]=604 ; men_death_rate[12]=0.1/1000.0 ;
men[13]=613 ; men_death_rate[13]=0.1/1000.0 ;
men[14]=610 ; men_death_rate[14]=0.1/1000.0 ;
men[15]=607 ; men_death_rate[15]=0.3/1000.0 ;
men[16]=627 ; men_death_rate[16]=0.3/1000.0 ;
men[17]=632 ; men_death_rate[17]=0.3/1000.0 ;
men[18]=621 ; men_death_rate[18]=0.3/1000.0 ; //1990年生まれ (ここまでが、ディタルネイティブ)
men[19]=631 ; men_death_rate[19]=0.3/1000.0 ;
men[20]=623 ; men_death_rate[20]=0.6/1000.0 ; //1992年生まれ
men[21]=632 ; men_death_rate[21]=0.6/1000.0 ;
men[22]=648 ; men_death_rate[22]=0.6/1000.0 ;
men[23]=668 ; men_death_rate[23]=0.6/1000.0 ;
men[24]=683 ; men_death_rate[24]=0.6/1000.0 ;
men[25]=697 ; men_death_rate[25]=0.7/1000.0 ;
men[26]=723 ; men_death_rate[26]=0.7/1000.0 ;
men[27]=745 ; men_death_rate[27]=0.7/1000.0 ;
men[28]=754 ; men_death_rate[28]=0.7/1000.0 ;
men[29]=754 ; men_death_rate[29]=0.7/1000.0 ;
men[30]=764 ; men_death_rate[30]=0.8/1000.0 ;
men[31]=797 ; men_death_rate[31]=0.8/1000.0 ;
men[32]=818 ; men_death_rate[32]=0.8/1000.0 ;
men[33]=852 ; men_death_rate[33]=0.8/1000.0 ;
men[34]=873 ; men_death_rate[34]=0.8/1000.0 ;
men[35]=917 ; men_death_rate[35]=1.0/1000.0 ;
men[36]=960 ; men_death_rate[36]=1.0/1000.0 ;
men[37]=1012 ; men_death_rate[37]=1.0/1000.0 ;
men[38]=1028 ; men_death_rate[38]=1.0/1000.0 ;
men[39]=1010 ; men_death_rate[39]=1.0/1000.0 ;
men[40]=982 ; men_death_rate[40]=1.5/1000.0 ;
men[41]=954 ; men_death_rate[41]=1.5/1000.0 ;
men[42]=937 ; men_death_rate[42]=1.5/1000.0 ;
men[43]=916 ; men_death_rate[43]=1.5/1000.0 ;
men[44]=915 ; men_death_rate[44]=1.5/1000.0 ;
men[45]=713 ; men_death_rate[45]=2.4/1000.0 ;
men[46]=882 ; men_death_rate[46]=2.4/1000.0 ;
men[47]=826 ; men_death_rate[47]=2.4/1000.0 ;
men[48]=805 ; men_death_rate[48]=2.4/1000.0 ;
men[49]=778 ; men_death_rate[49]=2.4/1000.0 ;
men[50]=765 ; men_death_rate[50]=3.8/1000.0 ;
men[51]=770 ; men_death_rate[51]=3.8/1000.0 ;
men[52]=783 ; men_death_rate[52]=3.8/1000.0 ;
men[53]=761 ; men_death_rate[53]=3.8/1000.0 ;
men[54]=740 ; men_death_rate[54]=3.8/1000.0 ;
men[55]=776 ; men_death_rate[55]=6.3/1000.0 ;
men[56]=803 ; men_death_rate[56]=6.3/1000.0 ;
men[57]=803 ; men_death_rate[57]=6.3/1000.0 ;
men[58]=850 ; men_death_rate[58]=6.3/1000.0 ;
men[59]=896 ; men_death_rate[59]=6.3/1000.0 ;
men[60]=949 ; men_death_rate[60]=9.3/1000.0 ;
men[61]=1018 ; men_death_rate[61]=9.3/1000.0 ;
men[62]=1111 ; men_death_rate[62]=9.3/1000.0 ;
men[63]=1099 ; men_death_rate[63]=9.3/1000.0 ;
men[64]=1042 ; men_death_rate[64]=9.3/1000.0 ;
men[65]=645 ; men_death_rate[65]=14.6/1000.0 ;
men[66]=684 ; men_death_rate[66]=14.6/1000.0 ;
men[67]=825 ; men_death_rate[67]=14.6/1000.0 ;
men[68]=794 ; men_death_rate[68]=14.6/1000.0 ;
men[69]=809 ; men_death_rate[69]=14.6/1000.0 ;
men[70]=780 ; men_death_rate[70]=22.7/1000.0 ;
men[71]=698 ; men_death_rate[71]=22.7/1000.0 ;
men[72]=599 ; men_death_rate[72]=22.7/1000.0 ;
men[73]=627 ; men_death_rate[73]=22.7/1000.0 ;
men[74]=631 ; men_death_rate[74]=22.7/1000.0 ;
men[75]=616 ; men_death_rate[75]=39.6/1000.0 ;
men[76]=571 ; men_death_rate[76]=39.6/1000.0 ;
men[77]=521 ; men_death_rate[77]=39.6/1000.0 ;
men[78]=501 ; men_death_rate[78]=39.6/1000.0 ;
men[79]=470 ; men_death_rate[79]=39.6/1000.0 ;
men[80]=430 ; men_death_rate[80]=70.5/1000.0 ;
men[81]=385 ; men_death_rate[81]=70.5/1000.0 ;
men[82]=350 ; men_death_rate[82]=70.5/1000.0 ;
men[83]=316 ; men_death_rate[83]=70.5/1000.0 ;
men[84]=281 ; men_death_rate[84]=70.5/1000.0 ;
men[85]=247 ; men_death_rate[85]=120.3/1000.0 ;
men[86]=202 ; men_death_rate[86]=120.3/1000.0 ;
men[87]=158 ; men_death_rate[87]=120.3/1000.0 ;
men[88]=122 ; men_death_rate[88]=120.3/1000.0 ;
men[89]=98 ; men_death_rate[89]=120.3/1000.0 ;
men[90]=78 ; men_death_rate[90]=202.5/1000.0 ;
men[91]=67 ; men_death_rate[91]=202.5/1000.0 ;
men[92]=44 ; men_death_rate[92]=202.5/1000.0 ;
men[93]=36 ; men_death_rate[93]=202.5/1000.0 ;
men[94]=28 ; men_death_rate[94]=202.5/1000.0 ;
men[95]=21 ; men_death_rate[95]=318.8/1000.0 ;
men[96]=15 ; men_death_rate[96]=318.8/1000.0 ;
men[97]=11 ; men_death_rate[97]=318.8/1000.0 ;
men[98]=7 ; men_death_rate[98]=318.8/1000.0 ;
men[99]=5 ; men_death_rate[99]=318.8/1000.0 ;
women[ 0]=520; women_death_rate[ 0]=2.1/1000.0 ;// 女性0歳人口520千人、死亡率0.21%
women[ 1]=510; women_death_rate[ 1]=0.4/1000.0 ;
women[ 2]=511; women_death_rate[ 2]=0.2/1000.0 ;
women[ 3]=525; women_death_rate[ 3]=0.1/1000.0 ;
women[ 4]=522; women_death_rate[ 4]=0.1/1000.0 ;
women[ 5]=518; women_death_rate[ 5]=0.1/1000.0 ;
women[ 6]=517; women_death_rate[ 6]=0.1/1000.0 ;
women[ 7]=538; women_death_rate[ 7]=0.1/1000.0 ;
women[ 8]=545; women_death_rate[ 8]=0.1/1000.0 ;
women[ 9]=561; women_death_rate[ 9]=0.1/1000.0 ;
women[10]=568; women_death_rate[10]=0.1/1000.0 ;
women[11]=573; women_death_rate[11]=0.1/1000.0 ;
women[12]=576; women_death_rate[12]=0.1/1000.0 ;
women[13]=585; women_death_rate[13]=0.1/1000.0 ;
women[14]=583; women_death_rate[14]=0.1/1000.0 ;
women[15]=578; women_death_rate[15]=0.2/1000.0 ;
women[16]=595; women_death_rate[16]=0.2/1000.0 ;
women[17]=597; women_death_rate[17]=0.2/1000.0 ;
women[18]=589; women_death_rate[18]=0.2/1000.0 ;//1990年生まれ (ここまでが、ディタルネイティブ)
women[19]=599; women_death_rate[19]=0.2/1000.0 ;
women[20]=596; women_death_rate[20]=0.3/1000.0 ;
women[21]=605; women_death_rate[21]=0.3/1000.0 ;
women[22]=622; women_death_rate[22]=0.3/1000.0 ;
women[23]=638; women_death_rate[23]=0.3/1000.0 ;
women[24]=655; women_death_rate[24]=0.3/1000.0 ;
women[25]=667; women_death_rate[25]=0.3/1000.0 ;
women[26]=697; women_death_rate[26]=0.3/1000.0 ;
women[27]=719; women_death_rate[27]=0.3/1000.0 ;
women[28]=729; women_death_rate[28]=0.3/1000.0 ;
women[29]=734; women_death_rate[29]=0.3/1000.0 ;
women[30]=742; women_death_rate[30]=0.4/1000.0 ;
women[31]=774; women_death_rate[31]=0.4/1000.0 ;
women[32]=794; women_death_rate[32]=0.4/1000.0 ;
women[33]=828; women_death_rate[33]=0.4/1000.0 ;
women[34]=849; women_death_rate[34]=0.4/1000.0 ;
women[35]=890; women_death_rate[35]=0.6/1000.0 ;
women[36]=931; women_death_rate[36]=0.6/1000.0 ;
women[37]=982; women_death_rate[37]=0.6/1000.0 ;
women[38]=1001; women_death_rate[38]=0.6/1000.0 ;
women[39]=981; women_death_rate[39]=0.6/1000.0 ;
women[40]=958; women_death_rate[40]=0.8/1000.0 ;
women[41]=931; women_death_rate[41]=0.8/1000.0 ;
women[42]=920; women_death_rate[42]=0.8/1000.0 ;
women[43]=902; women_death_rate[43]=0.8/1000.0 ;
women[44]=898; women_death_rate[44]=0.8/1000.0 ;
women[45]=705; women_death_rate[45]=1.3/1000.0 ;
women[46]=872; women_death_rate[46]=1.3/1000.0 ;
women[47]=815; women_death_rate[47]=1.3/1000.0 ;
women[48]=798; women_death_rate[48]=1.3/1000.0 ;
women[49]=772; women_death_rate[49]=1.3/1000.0 ;
women[50]=760; women_death_rate[50]=1.9/1000.0 ;
women[51]=768; women_death_rate[51]=1.9/1000.0 ;
women[52]=783; women_death_rate[52]=1.9/1000.0 ;
women[53]=765; women_death_rate[53]=1.9/1000.0 ;
women[54]=744; women_death_rate[54]=1.9/1000.0 ;
women[55]=783; women_death_rate[55]=2.8/1000.0 ;
women[56]=810; women_death_rate[56]=2.8/1000.0 ;
women[57]=813; women_death_rate[57]=2.8/1000.0 ;
women[58]=868; women_death_rate[58]=2.8/1000.0 ;
women[59]=918; women_death_rate[59]=2.8/1000.0 ;
women[60]=975; women_death_rate[60]=3.9/1000.0 ;
women[61]=1051; women_death_rate[61]=3.9/1000.0 ;
women[62]=1152; women_death_rate[62]=3.9/1000.0 ;
women[63]=1146; women_death_rate[63]=3.9/1000.0 ;
women[64]=1090; women_death_rate[64]=3.9/1000.0 ;
women[65]=685; women_death_rate[65]=6.0/1000.0 ;
women[66]=741; women_death_rate[66]=6.0/1000.0 ;
women[67]=903; women_death_rate[67]=6.0/1000.0 ;
women[68]=875; women_death_rate[68]=6.0/1000.0 ;
women[69]=899; women_death_rate[69]=6.0/1000.0 ;
women[70]=873; women_death_rate[70]=9.8/1000.0 ;
women[71]=793; women_death_rate[71]=9.8/1000.0 ;
women[72]=690; women_death_rate[72]=9.8/1000.0 ;
women[73]=738; women_death_rate[73]=9.8/1000.0 ;
women[74]=755; women_death_rate[74]=9.8/1000.0 ;
women[75]=753; women_death_rate[75]=17.9/1000.0 ;
women[76]=718; women_death_rate[76]=17.9/1000.0 ;
women[77]=675; women_death_rate[77]=17.9/1000.0 ;
women[78]=671; women_death_rate[78]=17.9/1000.0 ;
women[79]=646; women_death_rate[79]=17.9/1000.0 ;
women[80]=614; women_death_rate[80]=34.3/1000.0 ;
women[81]=573; women_death_rate[81]=34.3/1000.0 ;
women[82]=547; women_death_rate[82]=34.3/1000.0 ;
women[83]=515; women_death_rate[83]=34.3/1000.0 ;
women[84]=482; women_death_rate[84]=34.3/1000.0 ;
women[85]=454; women_death_rate[85]=69.1/1000.0 ;
women[86]=405; women_death_rate[86]=69.1/1000.0 ;
women[87]=349; women_death_rate[87]=69.1/1000.0 ;
women[88]=313; women_death_rate[88]=69.1/1000.0 ;
women[89]=276; women_death_rate[89]=69.1/1000.0 ;
women[90]=236; women_death_rate[90]=131.2/1000.0 ;
women[91]=213; women_death_rate[91]=131.2/1000.0 ;
women[92]=146; women_death_rate[92]=131.2/1000.0 ;
women[93]=128; women_death_rate[93]=131.2/1000.0 ;
women[94]=106; women_death_rate[94]=131.2/1000.0 ;
women[95]=87 ; women_death_rate[95]=238.1/1000.0 ;
women[96]=63 ; women_death_rate[96]=238.1/1000.0 ;
women[97]=49 ; women_death_rate[97]=238.1/1000.0 ;
women[98]=35 ; women_death_rate[98]=238.1/1000.0 ;
women[99]=25 ; women_death_rate[99]=238.1/1000.0 ;
for (int year = 2012; year < 2100; year++){ // 2012年から2100年までループ計算
double dummy = 0;
for(int i = 15; i < 50; i++){ // 特殊出産率の対象 15歳から49歳までの人口加算
dummy += women[i];
}
// 1.4は、特殊出生率 / 35は特殊出生率の対象期間(35年) / 1.05は男性の出生比率
double mem_new_birth = dummy * 1.4 / 35.0 * 1.05/(1.05+1.00);
double womem_new_birth = dummy * 1.4 / 35.0 * 1.00/(1.05+1.00);
// 1年単位の人口移動 (死亡率も考慮)
for (int k = 99; k >= 0; k--){
men[k+1] = men[k] * (1.0 - men_death_rate[k]);
women[k+1] = women[k] * (1.0 - women_death_rate[k]);
//printf("%d %f %f \n", k, men[k], women[k]);
}
// 新生児の人口を追加
men[0] = mem_new_birth;
women[0] = womem_new_birth;
// 人口総計(年齢99歳まで。100歳以上の人口は無視することにした)
double sum_men = 0;
double sum_women = 0;
for (int m = 0; m <= 100; m++){
sum_men += men[m];
sum_women += women[m];
}
#if 0
// ディタルネイティブ人口総計
double digital_sum_men = 0;
double digital_sum_women = 0;
int l = year -1990;
if (l >= 100) l = 100;
for (int n = 0; n <= l ; n++){
digital_sum_men += men[n];
digital_sum_women += women[n];
}
#endif
#if 0 // ここから江端仮説
// ディタルネイティブ人口総計
double digital_sum_men = 0;
double digital_sum_women = 0;
// 1970年以後の人は100%デジタルは使えるいう仮説の導入
int l = year -1970;
if (l >= 100) l = 100;
for (int n = 0; n <= l ; n++){
digital_sum_men += men[n];
digital_sum_women += women[n];
}
// 1950-70年にかけてデジタルを使える人は線形に増加した、という仮説の導入
// デジタルネイティブ人口(江端"補正"仮説)
int p1 = year -1970; // 例:2020年の時に50歳
int p2 = year -1950; // 例:2020年の時に70歳
for (int i = p1; i < p2 ; i++){
if (i < 100){
// 例:2020年の時に70歳の人の0%、 60歳の人の50%、50歳の人の100%がデジタルを扱えるとする
digital_sum_men += men[i] * 1.0 / (double)(p2 - p1) * (double)(p2 - i);
digital_sum_women += women[i] * 1.0 / (double)(p2 - p1) * (double)(p2 - i);
}
}
#endif
#if 1
// 高齢者世代(65歳以上)に特化して計算してみる
// 人口総計(年齢65歳から99歳まで。100歳以上の人口は無視することにした)
sum_men = 0;
sum_women = 0;
for (int m = 65; m <= 100; m++){
sum_men += men[m];
sum_women += women[m];
}
// ディタルネイティブ人口総計
double digital_sum_men = 0;
double digital_sum_women = 0;
// 1970年以後の人は100%デジタルは使えるいう仮説の導入
int l = year -1970;
if (l >= 100) l = 100;
for (int n = 65; n <= l ; n++){
digital_sum_men += men[n];
digital_sum_women += women[n];
}
// 1950-70年にかけてデジタルを使える人は線形に増加した、という仮説の導入
// デジタルネイティブ人口(江端"補正"仮説)
int p1 = year -1970; // 例:2020年の時に50歳 2017年の時に47歳
int p2 = year -1950; // 例:2020年の時に70歳 2017年の時に67歳
for (int i = p1; i < p2 ; i++){
if ((i >= 65) &&(i < 100)){
// 例:2020年の時に70歳の人の0%、 60歳の人の50%、50歳の人の100%がデジタルを扱えるとする
digital_sum_men += men[i] * 1.0 / (double)(p2 - p1) * (double)(p2 - i);
digital_sum_women += women[i] * 1.0 / (double)(p2 - p1) * (double)(p2 - i);
}
}
#endif
printf("%d,%f,%f,%f\n", year, sum_men + sum_women, digital_sum_men + digital_sum_women, (digital_sum_men + digital_sum_women)/(sum_men + sum_women) );
}
}