OvenMediaEngine構築作業中
python --version、 python3 --version のいずれも、"Python"とだけリターンが戻ってきて終了します。
コントロールパネルを開きます。
プログラムまたはプログラムと機能を選択します。
プログラムの一覧からPythonを探し、選択します。
アンインストールをクリックします。多くの場合、Pythonの各バージョンが個別にリストアップされているので、削除したいものをすべてアンインストールする必要があります。
指示に従ってアンインストールプロセスを完了します。
ステップ 1: Pythonのダウンロード
Pythonの公式ウェブサイトにアクセスします。
「Download Python 3.x.x」(xは最新バージョン番号を示します)をクリックして、インストーラーをダウンロードします。
ステップ 2: インストーラーの実行
ダウンロードしたインストーラー(例:python-3.x.x.exe)を実行します。
インストールの初期画面で「Add Python 3.x to PATH」のチェックボックスを選択します(これにより、コマンドラインからPythonを実行できるようになります)。
「Install Now」をクリックして、インストールを開始します。
注: より詳細な設定を行いたい場合は、「Customize installation」を選択して、インストールオプションをカスタマイズできます。
ステップ 3: インストールの確認
インストーラーが完了すると、Pythonが正常にインストールされたことを確認するために、以下の手順でバージョン情報をチェックすることができます:
スタートメニューを開き、「cmd」とタイプしてコマンドプロンプトを開きます。
コマンドプロンプトで以下のコマンドを入力して、インストールされたPythonのバージョンを確認します。
css
Copy code
python --version
または
css
Copy code
python3 --version
ステップ 4: pipの確認
pipはPythonでパッケージを管理するためのツールで、Pythonと一緒にインストールされるはずです。以下のコマンドでpipがインストールされているかを確認できます:
css
Copy code
pip --version
もしpipがない場合や問題がある場合は、pipを手動でインストールする必要がありますが、Pythonのインストーラーを使って正常にインストールが行われた場合は、自動的にpipもインストールされるはずです。
これらのステップを完了すると、Windows 11にPythonがインストールされ、使用を開始することができます。
ーーーーー
ところが状況が改善されない!
Microsoftのページに飛んで、そこのボタンを押して入れた(なんだか良くわからんが、まあ、そのまま放置した)
$ python3 --version
Python 3.11.6
と出てきているが、まあ、なんでもいいや。
ーーーーー
tomoi@DESKTOP-NHQLQU4 MSYS ~
$ pwd
/c/Users/tomoi
tomoi@DESKTOP-NHQLQU4 MSYS ~
$ mkdir -p ome_config
tomoi@DESKTOP-NHQLQU4 MSYS ~
$ cd ome_config/
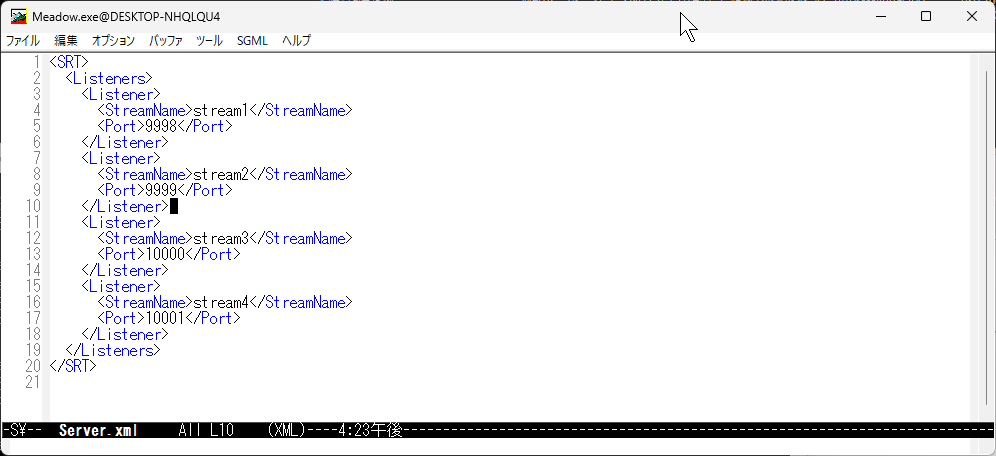
OvenMediaEngineのDockerの起動
docker run -d -p 1935:1935 -p 3333:3333 -p 8080:8080 -p 9000:9000 -p 9998:9998/udp -p 9999:9999/udp -p 10000:10000/udp -p 10001:10001/udp -v /c/Users/tomoi/one_config:/opt/ovenmediaengine/bin/origin_conf --name ovenmediaengine airensoft/ovenmediaengine:latest
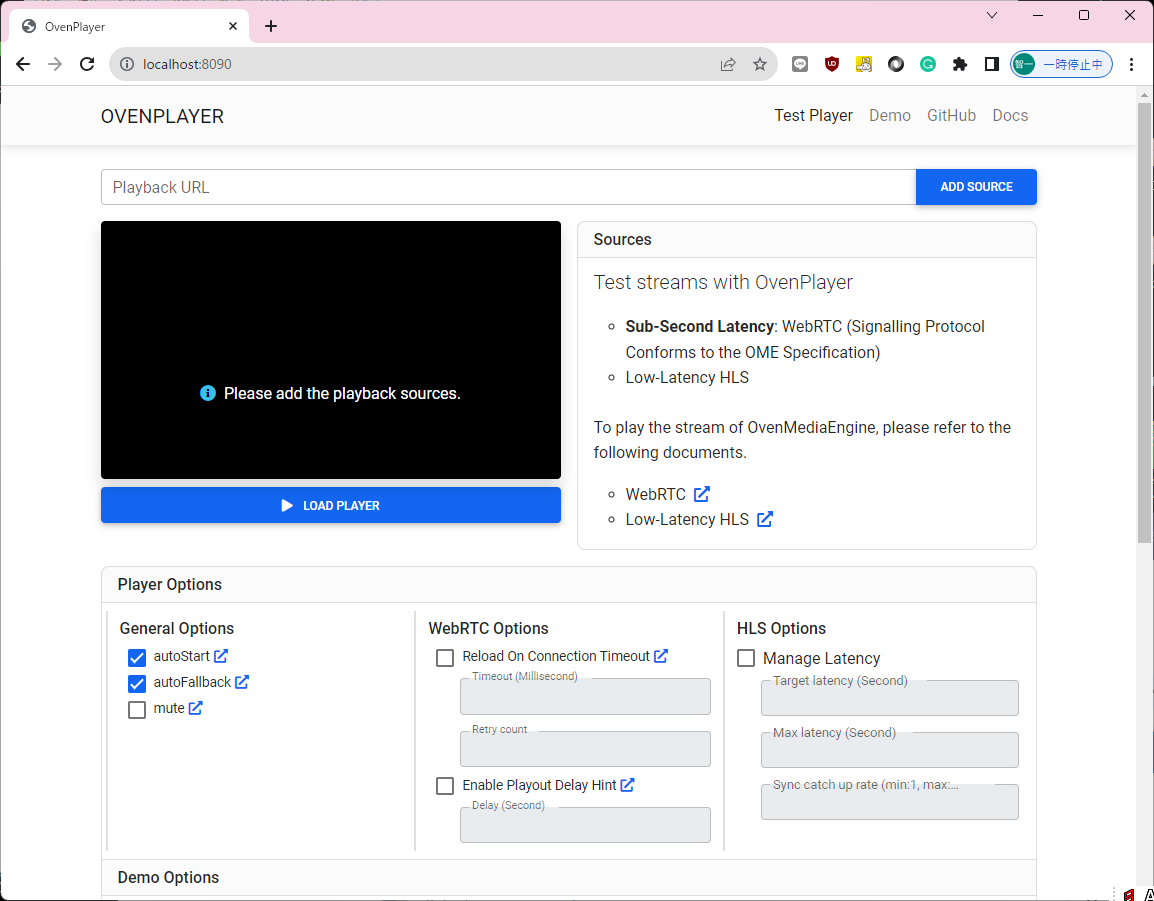
Run OvenPlayerのDockerの起動
$ docker run -d -p 8090:80 airensoft/ovenplayerdemo:latest
とりあえず、少なくとも、http://localhost:8090/で、以下は出てくる
やっとこさ、パースに成功(酷く時間がかかった)。忘れそうなのでメモっておく
まだ問題山積だけど、golangのCSVパースが通った。
package main
import (
"encoding/csv"
"encoding/json"
"fmt"
"strings"
)
type Location struct {
Lat float64 `json:"lat"`
Lng float64 `json:"lng"`
}
type Record struct {
ID int `json:"id"`
UserID int `json:"user_id"`
Distance float64 `json:"distance"`
Place []Location `json:"place"`
Speed []float64 `json:"speed"`
Prediction int `json:"prediction_type"`
StartAt string `json:"start_at"`
EndAt string `json:"end_at"`
}
func main() {
// 提供されたCSVデータ
csvData := `50,7,53.04935656638487,"[{""lat"": 34.6653, ""lng"": 135.2241}, {""lat"": 34.6653, ""lng"": 135.2241}, {""lat"": 34.6652, ""lng"": 135.2241}, {""lat"": 34.6652, ""lng"": 135.224}, {""lat"": 34.6651, ""lng"": 135.224}, {""lat"": 34.665, ""lng"": 135.224}, {""lat"": 34.6649, ""lng"": 135.2239}]","[0.0, 0.0001, 0.0002, 0.0002, 0.0004, 0.0004, 0.0004]",1,2023-03-03 07:40:00,2023-03-03 07:43:00`
// CSVデータを読み込む
r := csv.NewReader(strings.NewReader(csvData))
record, err := r.Read()
if err != nil {
fmt.Println("CSVデータを読み込めません:", err)
return
}
// CSVデータをパース
id := record[0]
userID := record[1]
distance := record[2]
placeJSON := record[3]
speedJSON := record[4]
prediction := record[5]
startAt := record[6]
endAt := record[7]
// JSONデータをパース
var place []Location
if err := json.Unmarshal([]byte(placeJSON), &place); err != nil {
fmt.Println("Placeデータをパースできません:", err)
return
}
var speed []float64
if err := json.Unmarshal([]byte(speedJSON), &speed); err != nil {
fmt.Println("Speedデータをパースできません:", err)
return
}
// パースしたデータを表示
fmt.Println("ID:", id)
fmt.Println("User ID:", userID)
fmt.Println("Distance:", distance)
fmt.Println("Place:", place)
// Placeを要素単位で表示
fmt.Println("Place:")
for _, loc := range place {
fmt.Printf("Lat: %.4f, Lng: %.4f\n", loc.Lat, loc.Lng)
}
fmt.Println("Speed:", speed)
// Speedを要素単位で表示
fmt.Println("\nSpeed:")
for i, s := range speed {
fmt.Printf("Index %d: %.4f\n", i, s)
}
fmt.Println("Prediction Type:", prediction)
fmt.Println("Start At:", startAt)
fmt.Println("End At:", endAt)
}
出力結果
ID: 50
User ID: 7
Distance: 53.04935656638487
Place: [{34.6653 135.2241} {34.6653 135.2241} {34.6652 135.2241} {34.6652 135.224} {34.6651 135.224} {34.665 135.224} {34.6649 135.2239}]
Place:
Lat: 34.6653, Lng: 135.2241
Lat: 34.6653, Lng: 135.2241
Lat: 34.6652, Lng: 135.2241
Lat: 34.6652, Lng: 135.2240
Lat: 34.6651, Lng: 135.2240
Lat: 34.6650, Lng: 135.2240
Lat: 34.6649, Lng: 135.2239
Speed: [0 0.0001 0.0002 0.0002 0.0004 0.0004 0.0004]Speed:
Index 0: 0.0000
Index 1: 0.0001
Index 2: 0.0002
Index 3: 0.0002
Index 4: 0.0004
Index 5: 0.0004
Index 6: 0.0004
Prediction Type: 1
Start At: 2023-03-03 07:40:00
End At: 2023-03-03 07:43:00
ミリ秒を表示する時計について
GNOMEデスクトップ環境でミリ秒を含むデジタル時計を表示するには、カスタムの拡張機能やウィジェットを使用することができます。以下は、GNOME拡張機能を使用してデジタル時計にミリ秒を追加する手順です。
GNOME拡張機能をインストール:
ミリ秒を含むデジタル時計を表示するために、GNOME Shellに拡張機能を追加する必要があります。このためには、GNOME拡張機能をインストールする必要があります。以下の手順でインストールできます。
a. GNOME Extensionsウェブサイトにアクセスします:https://extensions.gnome.org/
b. ウェブサイトで"GNOME Shellに追加"というボタンをクリックして、ブラウザ拡張機能をインストールします。
拡張機能の検索:
拡張機能を検索してインストールする前に、ミリ秒を含むデジタル時計を提供する拡張機能を見つける必要があります。GNOME拡張機能ウェブサイトで「clock」や「time」などのキーワードで検索し、適切な拡張機能を見つけます。例えば、"Digital Clock with Date" などの拡張機能がミリ秒を含むデジタル時計を提供していることがあります。
拡張機能のインストール:
選択した拡張機能を見つけたら、「GNOME Shellに追加」ボタンをクリックしてインストールします。
拡張機能の設定:
GNOME拡張機能アプリを開いて、インストールした拡張機能を有効にします。一般的に、GNOMEメニューの「拡張機能」または「Extensions」セクションから設定できます。
ミリ秒を含むデジタル時計の表示:
インストールした拡張機能を有効にしたら、GNOMEデスクトップ上にミリ秒を含むデジタル時計が表示されるはずです。
これで、GNOMEデスクトップ環境でミリ秒を含むデジタル時計を表示できるようになります。ただし、GNOME拡張機能はGNOMEバージョンに依存することがあるため、バージョンによっては異なる拡張機能が必要かもしれません。お使いのGNOMEバージョンに合った拡張機能を探し、設定してください。
とりあえずメモ(宿題)
CREATE TABLE trips_test (
id serial PRIMARY KEY,
user_id integer,
distance double precision,
place point[],
speed double precision[],
prediction_type integer,
start_at timestamp,
end_at timestamp
);
INSERT INTO trips_test (user_id, distance, place) VALUES (1, 24.66249845798845, ARRAY[point '(34.7241, 135.1294)', point '(34.7241, 135.1294)', point '(34.7241, 135.1294)']);
moove=# INSERT INTO trips_test (user_id, distance, place)
moove-# VALUES (1, 24.66249845798845, ARRAY[point '(34.7241, 135.1294)', point '(34.7241, 135.1294)', point '(34.7241, 135.1294)']);
INSERT 0 1
moove=# select * from trips_test;
id | user_id | distance | place | speed | prediction_type | start_at | end_at
----+---------+-------------------+------------------------------------------------------------------+-------+-----------------+----------+--------
1 | 1 | 24.66249845798845 | {"(34.7241,135.1294)","(34.7241,135.1294)","(34.7241,135.1294)"} | | | |
(1 row)
上記のテーブルから、座標情報を一つ一つ取り出すにはどうしたら良いですか
SELECT id, user_id, unnest(place) AS single_point
FROM trips_test;
moove=# SELECT id, user_id, unnest(place) AS single_point
moove-# FROM trips_test;
id | user_id | single_point
----+---------+--------------------
1 | 1 | (34.7241,135.1294)
1 | 1 | (34.7241,135.1294)
1 | 1 | (34.7241,135.1294)
Ubuntu 22.04、ラズパイ4にdockerをインストールする
Ubuntu 22.04にdockerをインストールする
を参考にして頂きつつ、インストール実施中。
私は、根拠なく、
$ sudo apt-get install docker-ce=5:24.0.4-1~ubuntu.22.04~jammy
を選びました。
ラズパイ4、Ubuntu22.04、で"docker compose"も動いているようです ーー "docker-compose"は動きません。
作業中
-- カスタムプロトコルの識別子(任意の値を設定)
local NX_PROTOCOL = Proto("NXDlink", "nxdlink protocol dissector")
-- プロトコルのフィールド定義
local nx_protocol_fields = NX_PROTOCOL.fields
nx_protocol_fields.magic = ProtoField.string("nx_protocol.magic", "Magic Number")
nx_protocol_fields.message_length = ProtoField.uint32("nx_protocol.message_length", "Message Length")
nx_protocol_fields.source_address = ProtoField.uint32("nx_protocol.source_address", "Source Address")
nx_protocol_fields.destination_address = ProtoField.uint32("nx_protocol.destination_address", "Destination Address")
nx_protocol_fields.timestamp = ProtoField.uint32("nx_protocol.timestamp", "Timestamp")
nx_protocol_fields.message_number = ProtoField.uint32("nx_protocol.message_number", "Message Number")
nx_protocol_fields.m_ctl = ProtoField.uint32("nx_protocol.m_ctl", "M_CTL")
nx_protocol_fields.inq_id = ProtoField.string("nx_protocol.inq_id", "INQ_ID")
nx_protocol_fields.tcd = ProtoField.uint32("nx_protocol.tcd", "TCD")
nx_protocol_fields.ver = ProtoField.uint32("nx_protocol.ver", "VER")
nx_protocol_fields.gtid = ProtoField.string("nx_protocol.gtid", "GTID")
nx_protocol_fields.mode = ProtoField.uint32("nx_protocol.mode", "MODE")
nx_protocol_fields.pver = ProtoField.uint32("nx_protocol.pver", "PVER")
nx_protocol_fields.pri = ProtoField.uint32("nx_protocol.pri", "PRI")
nx_protocol_fields.cbn = ProtoField.uint32("nx_protocol.cbn", "CBN")
nx_protocol_fields.tbn = ProtoField.uint32("nx_protocol.tbn", "TBN")
nx_protocol_fields.bsize = ProtoField.uint32("nx_protocol.bsize", "BSIZE")
nx_protocol_fields.fui = ProtoField.uint32("nx_protocol.fui", "FUI")
-- nx_protocol_fields.fc = ProtoField.uint32("nx_protocol.fc", "FC", base.HEX)
nx_protocol_fields.fc = ProtoField.uint32("nx_protocol.fc", "FC")
nx_protocol_fields.field_x = ProtoField.uint32("nx_protocol.field_x", "FIELD_X")
nx_protocol_fields.field_y = ProtoField.uint32("nx_protocol.field_y", "FIELD_Y")
nx_protocol_fields.field_z = ProtoField.uint32("nx_protocol.field_z", "FIELD_Z")
-- カスタムプロトコルの識別子(任意の値を設定)
--local DATA_PROTOCOL = Proto("DATALink", "datalink protocol dissector")
-- プロトコルのフィールド定義
--local data_protocol_fields = DATA_PROTOCOL.fields
--data_protocol_fields.fc = ProtoField.uint32("data_protocol.fc", "FC")
-- パケット解析関数
function NX_PROTOCOL.dissector(buffer, pinfo, tree)
-- フレーム情報を表示
pinfo.cols.protocol:set("NX Protocol")
local subtree = tree:add(NX_PROTOCOL, buffer(), "NX Protocol Data")
-- "NUXM" ヘッダ文字列を確認
local data = buffer():string()
-- local offset = data:find("NUXM")
local offset = data:find("NUXM") -1 -- 1を引かないと、ずれる
if not offset then
-- "NUXM" が見つからない場合は解析を中止
return
end
-- ヘッダ情報を解析
subtree:add(nx_protocol_fields.magic, buffer(offset, 4))
subtree:add(nx_protocol_fields.message_length, buffer(offset + 4, 4))
subtree:add(nx_protocol_fields.source_address, buffer(offset + 8, 4))
subtree:add(nx_protocol_fields.destination_address, buffer(offset + 12, 4))
subtree:add(nx_protocol_fields.timestamp, buffer(offset + 16, 4))
subtree:add(nx_protocol_fields.message_number, buffer(offset + 20, 4))
subtree:add(nx_protocol_fields.m_ctl, buffer(offset + 24, 4))
subtree:add(nx_protocol_fields.inq_id, buffer(offset + 28, 12))
subtree:add(nx_protocol_fields.tcd, buffer(offset + 40, 2))
subtree:add(nx_protocol_fields.ver, buffer(offset + 42, 2))
subtree:add(nx_protocol_fields.gtid, buffer(offset + 44, 8))
subtree:add(nx_protocol_fields.mode, buffer(offset + 52, 2))
subtree:add(nx_protocol_fields.pver, buffer(offset + 54, 1))
subtree:add(nx_protocol_fields.pri, buffer(offset + 55, 1))
subtree:add(nx_protocol_fields.cbn, buffer(offset + 56, 1))
subtree:add(nx_protocol_fields.tbn, buffer(offset + 57, 1))
subtree:add(nx_protocol_fields.fui, buffer(offset + 60, 4))
subtree:add(nx_protocol_fields.fc, buffer(offset + 64, 2))
-- fcの値を取得
-- local fc_value = buffer(offset + 64, 2):le_uint() -- リトルエンディアンの場合
local fc_value = buffer(offset + 64, 2)-- リトルエンディアンの場合
-- デバッグ情報を表示
-- print("fc_value:", string.format("0x%04X", fc_value)) -- 16進数表示
-- fcの値に応じてフィールドを追加
-- if fc_value == 0x181 then
-- if fc_value == 385 then
if fc_value = 0 then
-- 0x181の場合、特定のフィールドを追加
subtree:add(nx_protocol_fields.field_x, buffer(offset + 66, 4))
elseif fc_value == 0x183 then
-- 0x183の場合、別のフィールドを追加
subtree:add(nx_protocol_fields.field_y, buffer(offset + 66, 4))
elseif fc_value == 0x188 or fc_value == 0x189 then
-- 0x188または0x189の場合、共通のフィールドを追加
subtree:add(nx_protocol_fields.field_z, buffer(offset + 66, 4))
else
-- その他の場合、何もしない
end
end
--function DATA_PROTOCOL.dissector(buffer, pinfo, tree)
-- フレーム情報を表示
-- pinfo.cols.protocol:set("DATA Protocol")
-- local subtree = tree:add(DATA_PROTOCOL, buffer(), "DATA Protocol Data")
-- subtree:add(data_protocol_fields.fc, buffer(64, 2))
--end
-- プロトコルをWiresharkに登録
local udp_table = DissectorTable.get("udp.port")
udp_table:add(10631, NX_PROTOCOL) -- UDPポート10631でカスタムプロトコルを解析
udp_table:add(40311, NX_PROTOCOL) -- UDPポート40311でカスタムプロトコルを解析
udp_table:add(40312, NX_PROTOCOL) -- UDPポート40312でカスタムプロトコルを解析
どなたかラプラス分布の数学的意義を教えて下さい
ラプラス分布は、ランデル分布とも言われて、交通工学のシミュレーションでは非常に重要な確率分布として使われているようです。
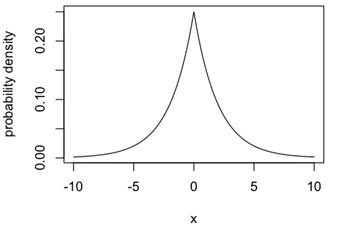
パラメータとして、平均(location parameter)を表す μ と尺度(scale parameter)を表すbを持ち、ラプラス分布の確率密度関数は、 f(x∣μ,b)=1/2b exp(−b∣x−μ∣) と表される。
でもって、
交通シミュレーションで使われる場面
■交通の到着間隔のモデリング → 乗客の到着間隔をモデル化するため
■トラフィックの所要時間の予測 → 自動車の移動時間やトラフィックの所要時間を予測するため
■信号制御の最適化 → 信号のサイクルタイムやフェーズの最適化を行うため
■交通事故の発生確率の評価 → 交通事故の発生確率を評価するため
と、まあ、ここまでは分かったのですが、この分布の数学的な意義が分かりません。(正規分布や指数分布などは、理解できていると思います)
未来を占う人工知能 ~人類が生み出した至宝の測定ツールhttps://t.co/fno5ZpjWTu pic.twitter.com/hjSbummE9r
— EE Times Japan編集部 (@eetimes_jp) January 31, 2018
ですが、ラプラス分布の数学的な意義が分かりません。
で、以下のように推察しているのですが、私のこの推察は正しいでしょうか?
ラプラス分布を使う理由(江端の私見)
■外れ値のモデル化の為
→ そもそも、バスの到着時間が、正規分布のように曖昧に分散していたらとても困る。情報通信についても同様。とは言え、外れ値を完全に無視することはできない。そこで、このような、交通、情報を扱う分布として、(積分して1になる関数として)便利なツールとして、ラプラス分布が使われている
どなたか、ご見解を頂ければ幸いです。
江端